 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSearch-based 3D Planning and Trajectory Optimization for Safe Micro Aerial Vehicle Flight Under Sensor Visibility Constraints
Paper and Code
Mar 12, 2019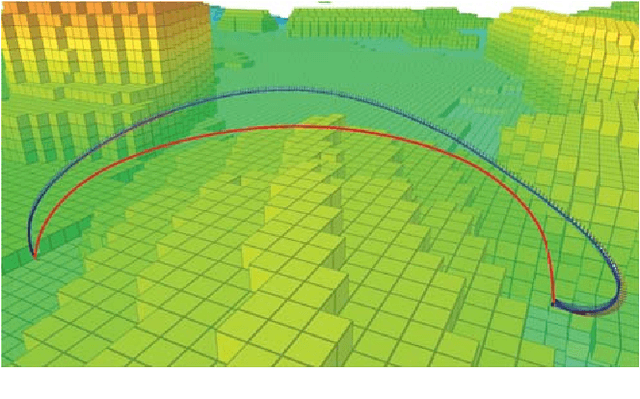
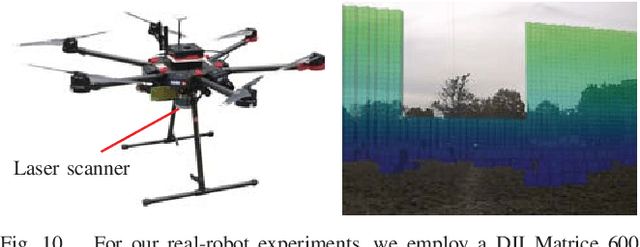
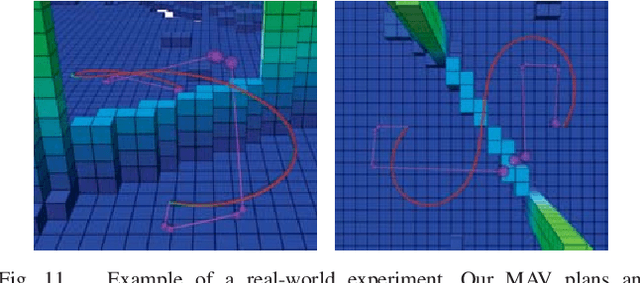
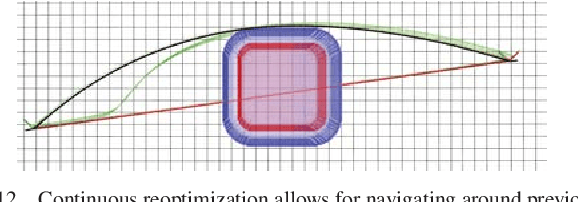
Safe navigation of Micro Aerial Vehicles (MAVs) requires not only obstacle-free flight paths according to a static environment map, but also the perception of and reaction to previously unknown and dynamic objects. This implies that the onboard sensors cover the current flight direction. Due to the limited payload of MAVs, full sensor coverage of the environment has to be traded off with flight time. Thus, often only a part of the environment is covered. We present a combined allocentric complete planning and trajectory optimization approach taking these sensor visibility constraints into account. The optimized trajectories yield flight paths within the apex angle of a Velodyne Puck Lite 3D laser scanner enabling low-level collision avoidance to perceive obstacles in the flight direction. Furthermore, the optimized trajectories take the flight dynamics into account and contain the velocities and accelerations along the path. We evaluate our approach with a DJI Matrice 600 MAV and in simulation employing hardware-in-the-loop.