 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe StreetLearn Environment and Dataset
Paper and Code
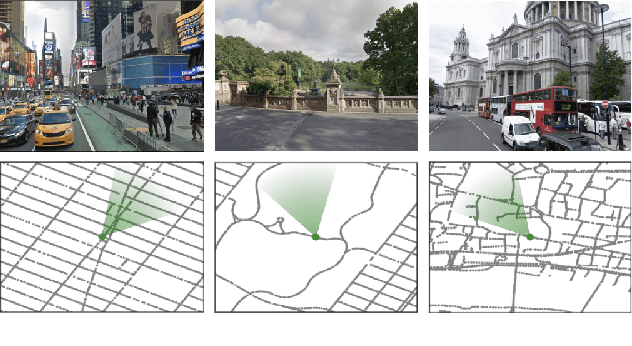
Navigation is a rich and well-grounded problem domain that drives progress in many different areas of research: perception, planning, memory, exploration, and optimisation in particular. Historically these challenges have been separately considered and solutions built that rely on stationary datasets - for example, recorded trajectories through an environment. These datasets cannot be used for decision-making and reinforcement learning, however, and in general the perspective of navigation as an interactive learning task, where the actions and behaviours of a learning agent are learned simultaneously with the perception and planning, is relatively unsupported. Thus, existing navigation benchmarks generally rely on static datasets (Geiger et al., 2013; Kendall et al., 2015) or simulators (Beattie et al., 2016; Shah et al., 2018). To support and validate research in end-to-end navigation, we present StreetLearn: an interactive, first-person, partially-observed visual environment that uses Google Street View for its photographic content and broad coverage, and give performance baselines for a challenging goal-driven navigation task. The environment code, baseline agent code, and the dataset are available at http://streetlearn.cc