 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Interpretable Non-Rigid Structure from Motion
Paper and Code
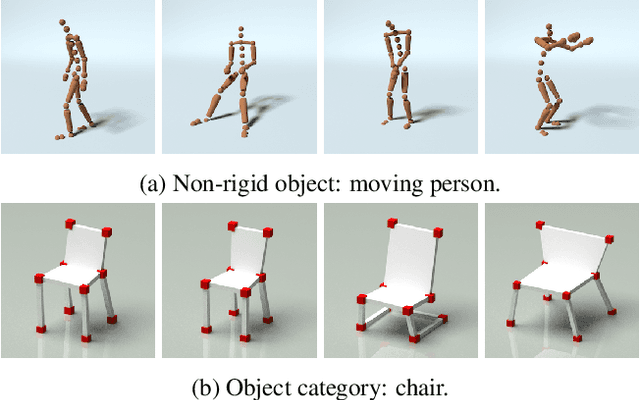

All current non-rigid structure from motion (NRSfM) algorithms are limited with respect to: (i) the number of images, and (ii) the type of shape variability they can handle. This has hampered the practical utility of NRSfM for many applications within vision. In this paper we propose a novel deep neural network to recover camera poses and 3D points solely from an ensemble of 2D image coordinates. The proposed neural network is mathematically interpretable as a multi-layer block sparse dictionary learning problem, and can handle problems of unprecedented scale and shape complexity. Extensive experiments demonstrate the impressive performance of our approach where we exhibit superior precision and robustness against all available state-of-the-art works. The considerable model capacity of our approach affords remarkable generalization to unseen data. We propose a quality measure (based on the network weights) which circumvents the need for 3D ground-truth to ascertain the confidence we have in the reconstruction. Once the network's weights are estimated (for a non-rigid object) we show how our approach can effectively recover 3D shape from a single image -- outperforming comparable methods that rely on direct 3D supervision.