 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShallow Water Bathymetry Mapping from UAV Imagery based on Machine Learning
Paper and Code
Feb 27, 2019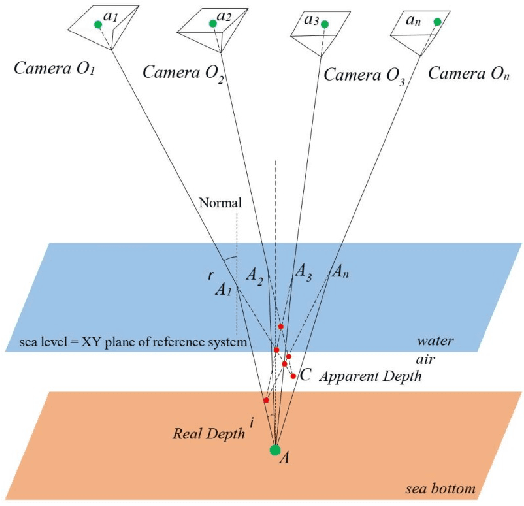
The determination of accurate bathymetric information is a key element for near offshore activities, hydrological studies such as coastal engineering applications, sedimentary processes, hydrographic surveying as well as archaeological mapping and biological research. UAV imagery processed with Structure from Motion (SfM) and Multi View Stereo (MVS) techniques can provide a low-cost alternative to established shallow seabed mapping techniques offering as well the important visual information. Nevertheless, water refraction poses significant challenges on depth determination. Till now, this problem has been addressed through customized image-based refraction correction algorithms or by modifying the collinearity equation. In this paper, in order to overcome the water refraction errors, we employ machine learning tools that are able to learn the systematic underestimation of the estimated depths. In the proposed approach, based on known depth observations from bathymetric LiDAR surveys, an SVR model was developed able to estimate more accurately the real depths of point clouds derived from SfM-MVS procedures. Experimental results over two test sites along with the performed quantitative validation indicated the high potential of the developed approach.