Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA dataset of 40K naturalistic 6-degree-of-freedom robotic grasp demonstrations
Paper and Code
Dec 31, 2018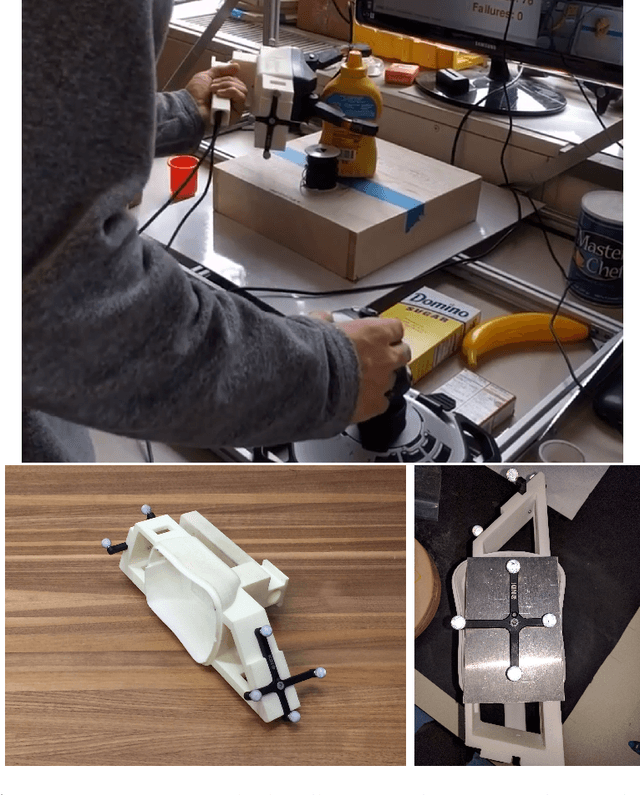
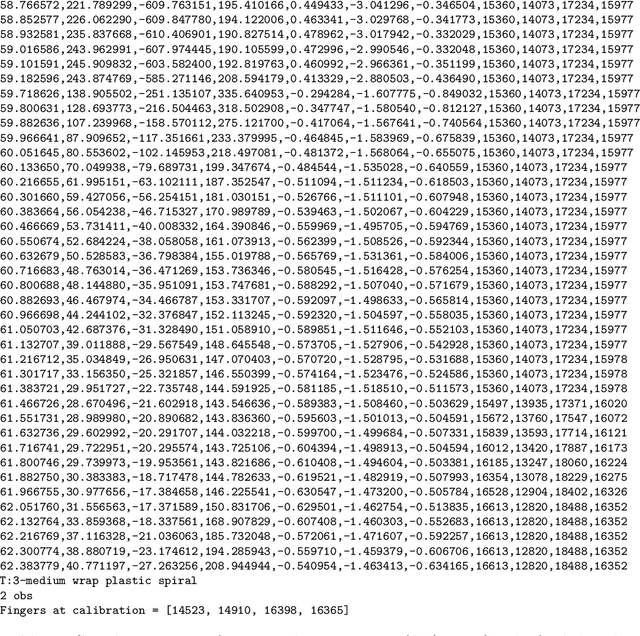
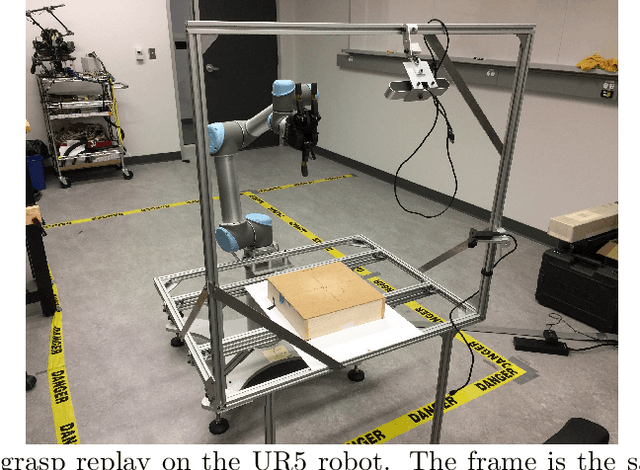
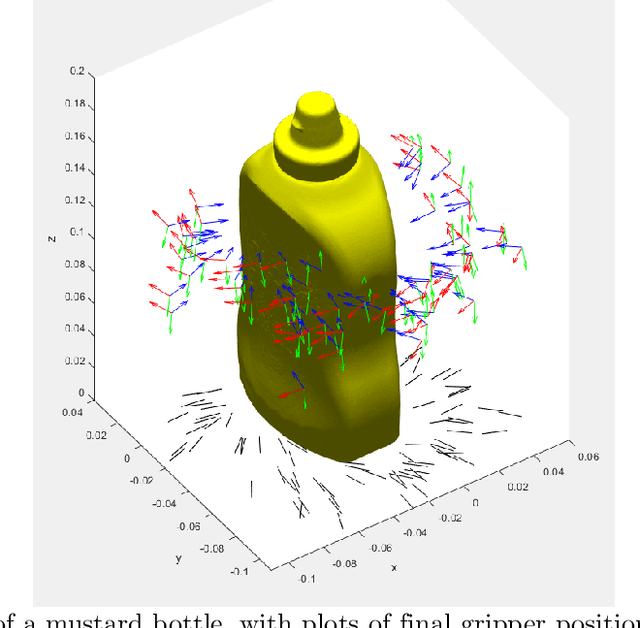
Modern approaches to grasp planning often involve deep learning. However, there are only a few large datasets of labelled grasping examples on physical robots, and available datasets involve relatively simple planar grasps with two-fingered grippers. Here we present: 1) a new human grasp demonstration method that facilitates rapid collection of naturalistic grasp examples, with full six-degree-of-freedom gripper positioning; and 2) a dataset of roughly forty thousand successful grasps on 109 different rigid objects with the RightHand Robotics three-fingered ReFlex gripper.
View paper on