 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePoint-to-Pose Voting based Hand Pose Estimation using Residual Permutation Equivariant Layer
Paper and Code
Dec 05, 2018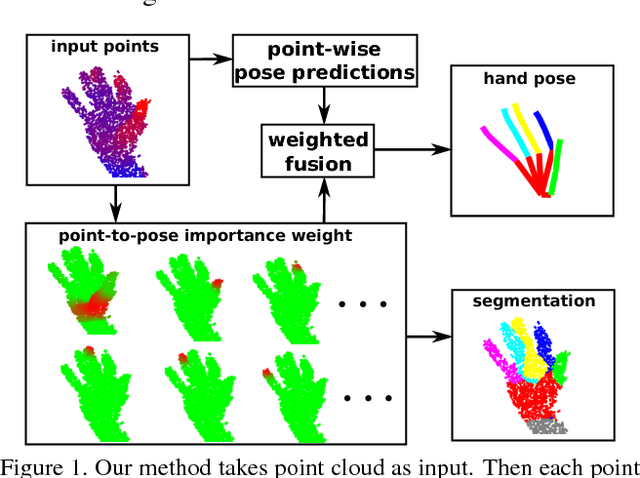
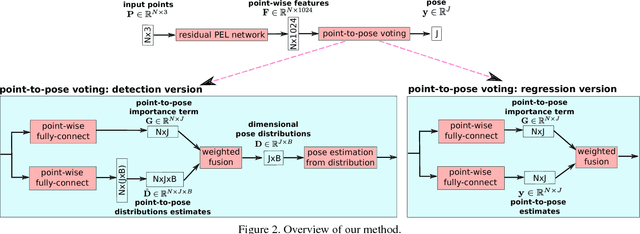
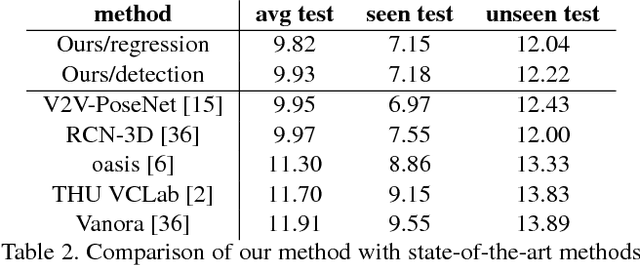
Recently, 3D input data based hand pose estimation methods have shown state-of-the-art performance, because 3D data capture more spatial information than the depth image. Whereas 3D voxel-based methods need a large amount of memory, PointNet based methods need tedious preprocessing steps such as K-nearest neighbour search for each point. In this paper, we present a novel deep learning hand pose estimation method for an unordered point cloud. Our method takes 1024 3D points as input and does not require additional information. We use Permutation Equivariant Layer (PEL) as the basic element, where a residual network version of PEL is proposed for the hand pose estimation task. Furthermore, we propose a voting based scheme to merge information from individual points to the final pose output. In addition to the pose estimation task, the voting-based scheme can also provide point cloud segmentation result without ground-truth for segmentation. We evaluate our method on both NYU dataset and the Hands2017Challenge dataset. Our method outperforms recent state-of-the-art methods, where our pose accuracy is currently the best for the Hands2017Challenge dataset.