Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Nonlinear Non-Gaussian Filtering for Dynamical Systems
Paper and Code
Nov 14, 2018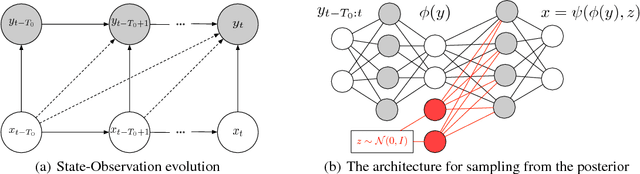
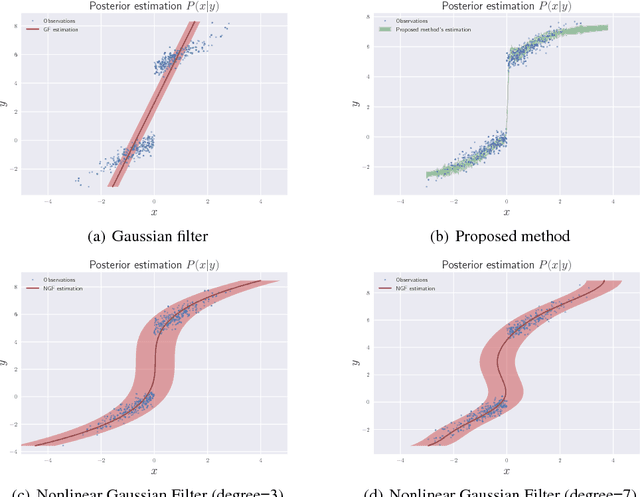
Filtering is a general name for inferring the states of a dynamical system given observations. The most common filtering approach is Gaussian Filtering (GF) where the distribution of the inferred states is a Gaussian whose mean is an affine function of the observations. There are two restrictions in this model: Gaussianity and Affinity. We propose a model to relax both these assumptions based on recent advances in implicit generative models. Empirical results show that the proposed method gives a significant advantage over GF and nonlinear methods based on fixed nonlinear kernels.
View paper on