 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInfoSSM: Interpretable Unsupervised Learning of Nonparametric State-Space Model for Multi-modal Dynamics
Paper and Code
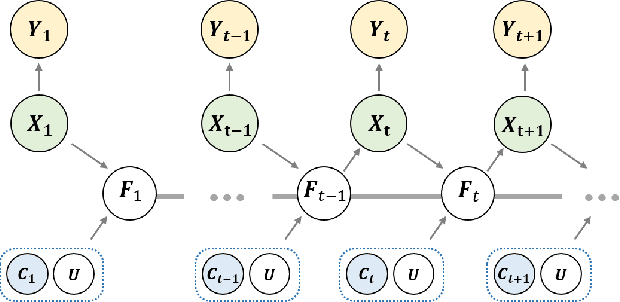

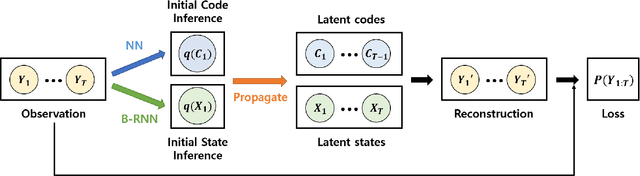

The goal of system identification is to learn about underlying physics dynamics behind the observed time-series data. To model the nonparametric and probabilistic dynamics model, Gaussian process state-space models (GPSSMs) have been widely studied; GPs are not only capable to represent nonlinear dynamics, but estimate the uncertainty of prediction and avoid over-fitting. Traditional GPSSMs, however, are based on Gaussian transition model, thus often have difficulty in describing multi-modal motions. To resolve the challenge, this thesis proposes a model using multiple GPs and extends the GPSSM to information-theoretic framework by introducing a mutual information regularizer helping the model to learn interpretable and disentangled representation of multi-modal transition dynamics model. Experiment results show that the proposed model not only successfully represents the observed system but distinguishes the dynamics mode that governs the given observation sequence.