 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBuilding Prior Knowledge: A Markov Based Pedestrian Prediction Model Using Urban Environmental Data
Paper and Code
Sep 17, 2018
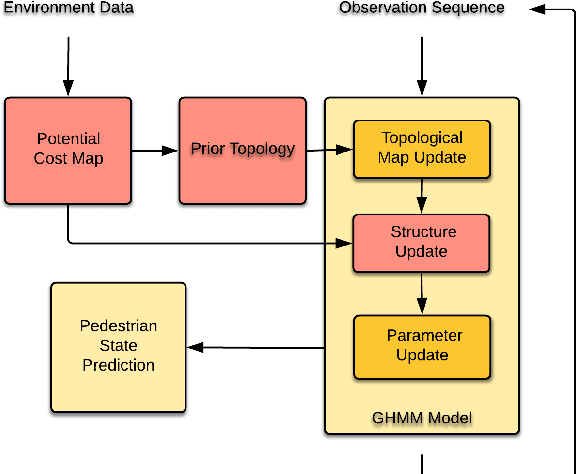
Autonomous Vehicles navigating in urban areas have a need to understand and predict future pedestrian behavior for safer navigation. This high level of situational awareness requires observing pedestrian behavior and extrapolating their positions to know future positions. While some work has been done in this field using Hidden Markov Models (HMMs), one of the few observed drawbacks of the method is the need for informed priors for learning behavior. In this work, an extension to the Growing Hidden Markov Model (GHMM) method is proposed to solve some of these drawbacks. This is achieved by building on existing work using potential cost maps and the principle of Natural Vision. As a consequence, the proposed model is able to predict pedestrian positions more precisely over a longer horizon compared to the state of the art. The method is tested over "legal" and "illegal" behavior of pedestrians, having trained the model with sparse observations and partial trajectories. The method, with no training data, is compared against a trained state of the art model. It is observed that the proposed method is robust even in new, previously unseen areas.