 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNon-Matrix Tactile Sensors: How Can Be Exploited Their Local Connectivity For Predicting Grasp Stability?
Paper and Code
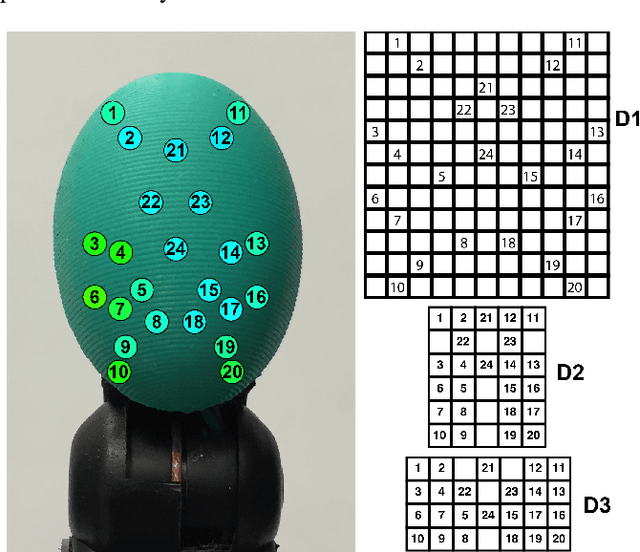
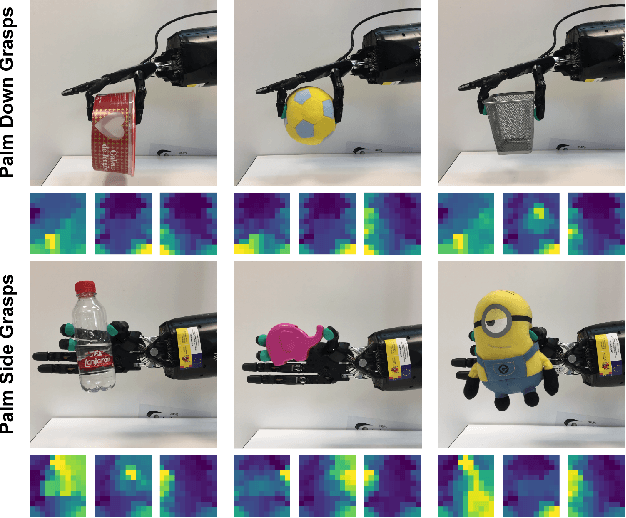
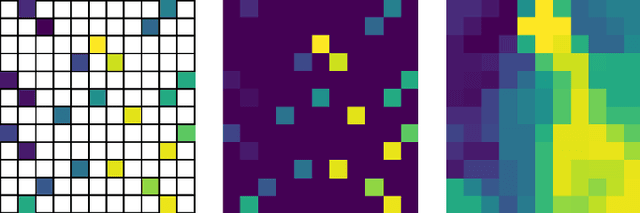
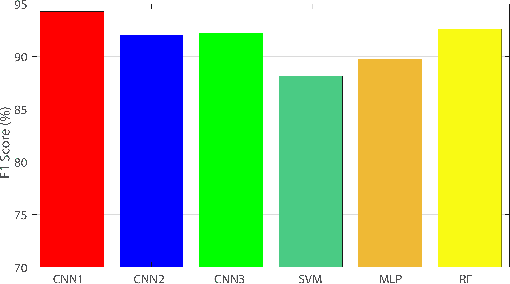
Tactile sensors supply useful information during the interaction with an object that can be used for assessing the stability of a grasp. Most of the previous works on this topic processed tactile readings as signals by calculating hand-picked features. Some of them have processed these readings as images calculating characteristics on matrix-like sensors. In this work, we explore how non-matrix sensors (sensors with taxels not arranged exactly in a matrix) can be processed as tactile images as well. In addition, we prove that they can be used for predicting grasp stability by training a Convolutional Neural Network (CNN) with them. We captured over 2500 real three-fingered grasps on 41 everyday objects to train a CNN that exploited the local connectivity inherent on the non-matrix tactile sensors, achieving 94.2% F1-score on predicting stability.