 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccurate Tracking of Aggressive Quadrotor Trajectories using Incremental Nonlinear Dynamic Inversion and Differential Flatness
Paper and Code
Sep 11, 2018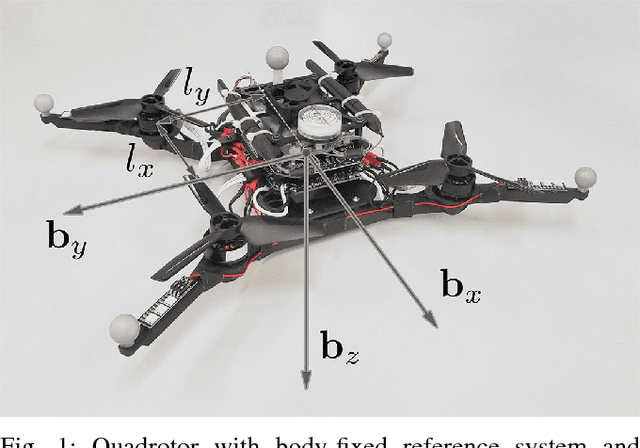
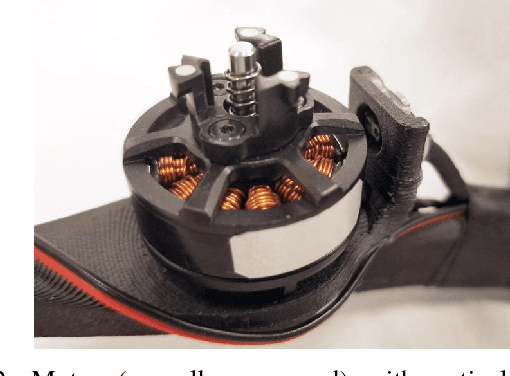
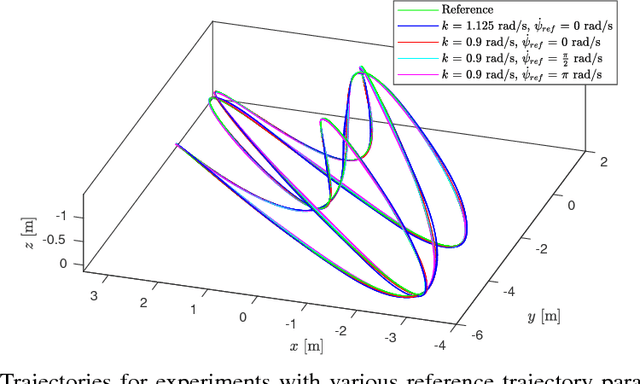
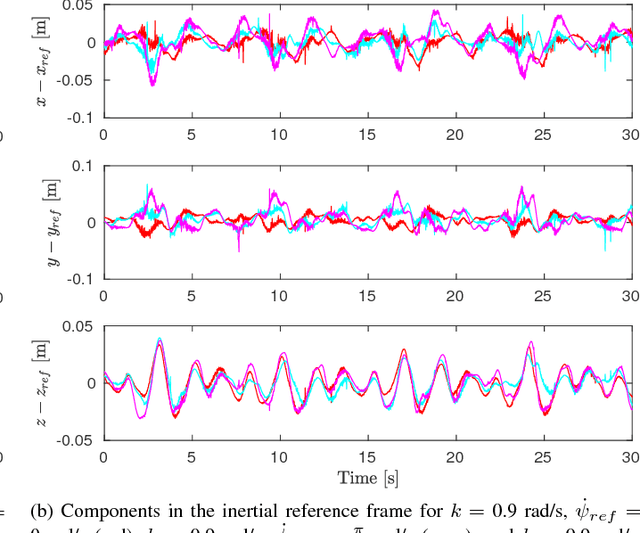
Autonomous unmanned aerial vehicles (UAVs) that can execute aggressive (i.e., high-speed and high-acceleration) maneuvers have attracted significant attention in the past few years. In this paper, we propose a novel control law for accurate tracking of aggressive quadcopter trajectories. The proposed method tracks position and yaw angle with their derivatives of up to fourth order, specifically, the position, velocity, acceleration, jerk, and snap along with the yaw angle, yaw rate and yaw acceleration. Two key aspects of the proposed method are the following. First, the controller exploits the differential flatness of the quadcopter dynamics to generate feedforward inputs for attitude rate and attitude acceleration in order to track the jerk and snap references. The tracking is enabled by direct control of body torque using closed-loop control of all four propeller speeds based on optical encoders attached to the motors. Second, the controller utilizes the incremental nonlinear dynamic inversion (INDI) method for accurate tracking of linear and angular accelerations despite external disturbances. Hence, no prior modeling of aerodynamic effects is required. We rigorously analyze the proposed controller through response analysis, and we demonstrate it in experiments. The proposed control law enables a 1-kg quadcopter UAV to track complex 3D trajectories, reaching speeds up to 8.2 m/s and accelerations up to 2g, while keeping the root-mean-square tracking error down to 4 cm, in a flight volume that is roughly 6.5 m long, 6.5 m wide, and 1.5 m tall. We also demonstrate the robustness of the controller by attaching a drag plate to the UAV in flight tests and by pulling on the UAV with a rope during hover.