 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeARCHER: Aggressive Rewards to Counter bias in Hindsight Experience Replay
Paper and Code
Sep 07, 2018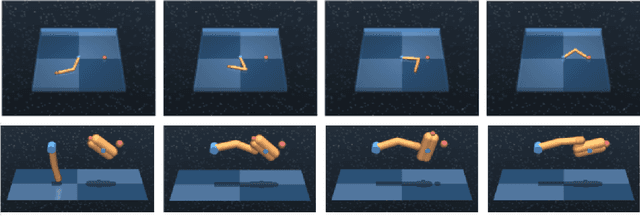
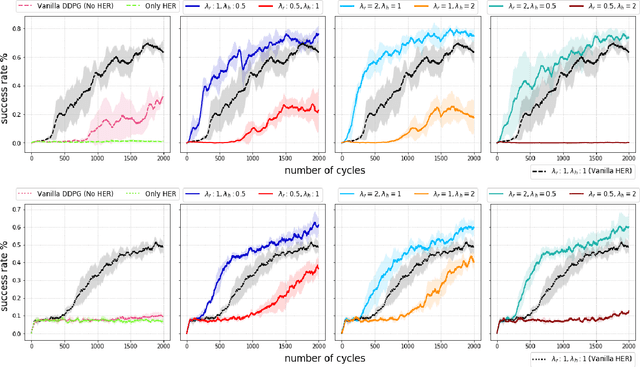
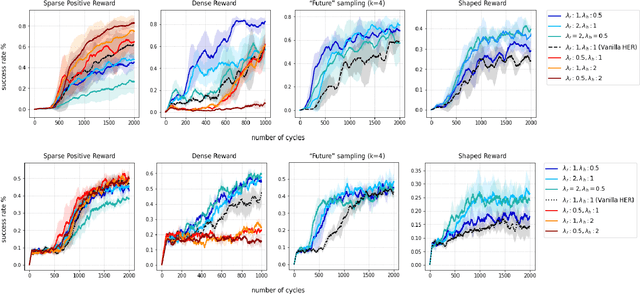
Experience replay is an important technique for addressing sample-inefficiency in deep reinforcement learning (RL), but faces difficulty in learning from binary and sparse rewards due to disproportionately few successful experiences in the replay buffer. Hindsight experience replay (HER) was recently proposed to tackle this difficulty by manipulating unsuccessful transitions, but in doing so, HER introduces a significant bias in the replay buffer experiences and therefore achieves a suboptimal improvement in sample-efficiency. In this paper, we present an analysis on the source of bias in HER, and propose a simple and effective method to counter the bias, to most effectively harness the sample-efficiency provided by HER. Our method, motivated by counter-factual reasoning and called ARCHER, extends HER with a trade-off to make rewards calculated for hindsight experiences numerically greater than real rewards. We validate our algorithm on two continuous control environments from DeepMind Control Suite - Reacher and Finger, which simulate manipulation tasks with a robotic arm - in combination with various reward functions, task complexities and goal sampling strategies. Our experiments consistently demonstrate that countering bias using more aggressive hindsight rewards increases sample efficiency, thus establishing the greater benefit of ARCHER in RL applications with limited computing budget.