Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFuture Semantic Segmentation with Convolutional LSTM
Paper and Code
Jul 20, 2018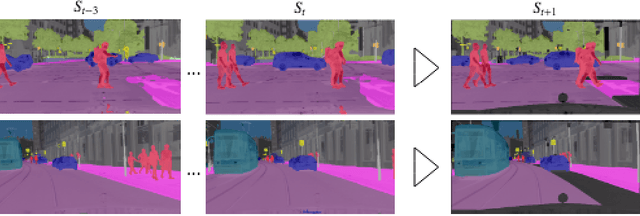
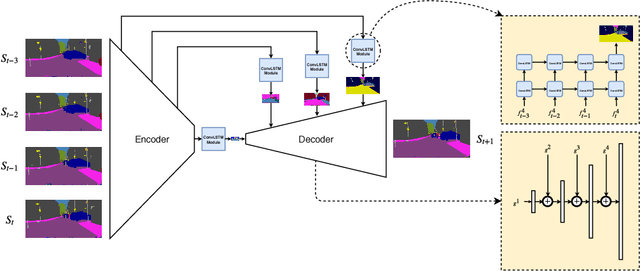
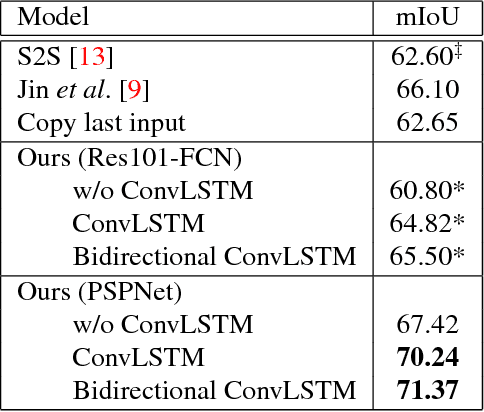
We consider the problem of predicting semantic segmentation of future frames in a video. Given several observed frames in a video, our goal is to predict the semantic segmentation map of future frames that are not yet observed. A reliable solution to this problem is useful in many applications that require real-time decision making, such as autonomous driving. We propose a novel model that uses convolutional LSTM (ConvLSTM) to encode the spatiotemporal information of observed frames for future prediction. We also extend our model to use bidirectional ConvLSTM to capture temporal information in both directions. Our proposed approach outperforms other state-of-the-art methods on the benchmark dataset.
* Accepted to BMVC 2018
View paper on