 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccurate and Diverse Sampling of Sequences based on a "Best of Many" Sample Objective
Paper and Code
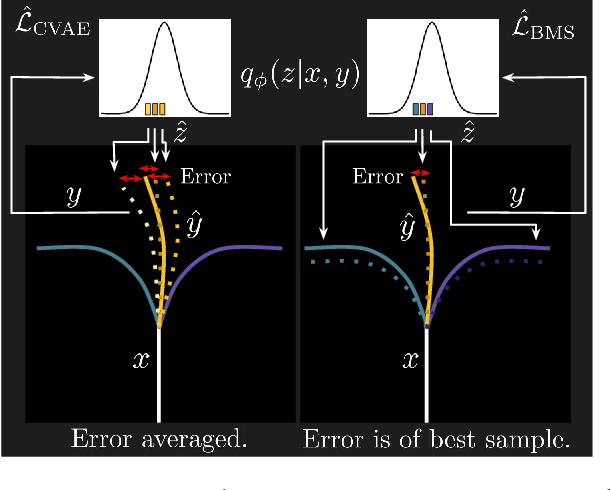
For autonomous agents to successfully operate in the real world, anticipation of future events and states of their environment is a key competence. This problem has been formalized as a sequence extrapolation problem, where a number of observations are used to predict the sequence into the future. Real-world scenarios demand a model of uncertainty of such predictions, as predictions become increasingly uncertain -- in particular on long time horizons. While impressive results have been shown on point estimates, scenarios that induce multi-modal distributions over future sequences remain challenging. Our work addresses these challenges in a Gaussian Latent Variable model for sequence prediction. Our core contribution is a "Best of Many" sample objective that leads to more accurate and more diverse predictions that better capture the true variations in real-world sequence data. Beyond our analysis of improved model fit, our models also empirically outperform prior work on three diverse tasks ranging from traffic scenes to weather data.