 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeForesee: Attentive Future Projections of Chaotic Road Environments with Online Training
Paper and Code

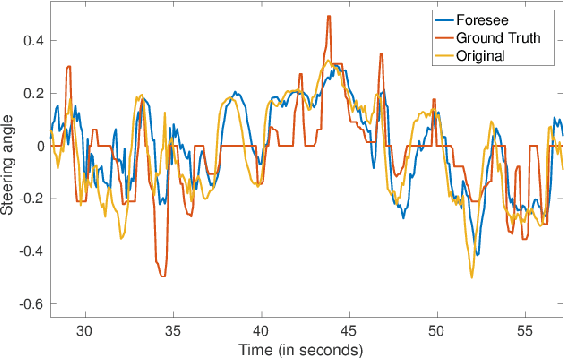
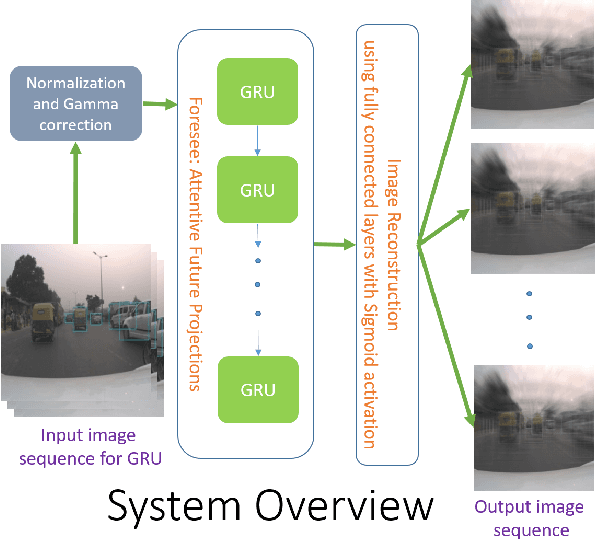
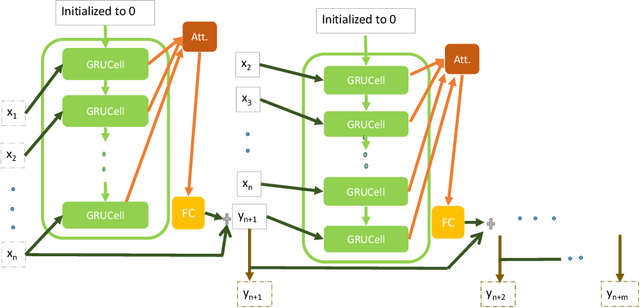
In this paper, we train a recurrent neural network to learn dynamics of a chaotic road environment and to project the future of the environment on an image. Future projection can be used to anticipate an unseen environment for example, in autonomous driving. Road environment is highly dynamic and complex due to the interaction among traffic participants such as vehicles and pedestrians. Even in this complex environment, a human driver is efficacious to safely drive on chaotic roads irrespective of the number of traffic participants. The proliferation of deep learning research has shown the efficacy of neural networks in learning this human behavior. In the same direction, we investigate recurrent neural networks to understand the chaotic road environment which is shared by pedestrians, vehicles (cars, trucks, bicycles etc.), and sometimes animals as well. We propose \emph{Foresee}, a unidirectional gated recurrent units (GRUs) network with attention to project future of the environment in the form of images. We have collected several videos on Delhi roads consisting of various traffic participants, background and infrastructure differences (like 3D pedestrian crossing) at various times on various days. We train \emph{Foresee} in an unsupervised way and we use online training to project frames up to $0.5$ seconds in advance. We show that our proposed model performs better than state of the art methods (prednet and Enc. Dec. LSTM) and finally, we show that our trained model generalizes to a public dataset for future projections.