 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInverse POMDP: Inferring What You Think from What You Do
Paper and Code
Oct 07, 2018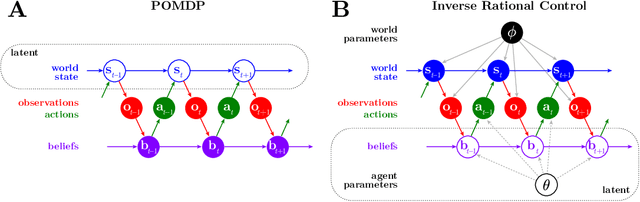
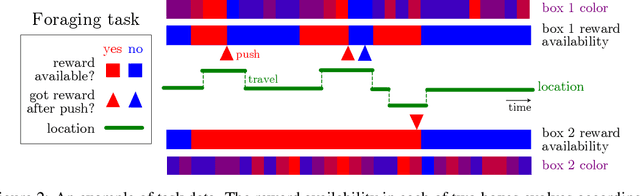
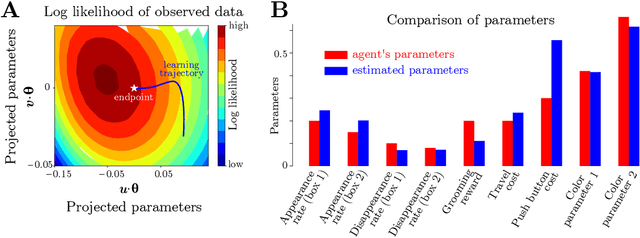
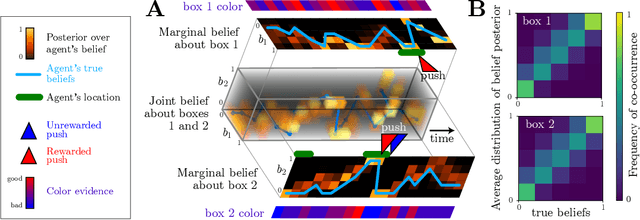
Complex behaviors are often driven by an internal model, which integrates sensory information over time and facilitates long-term planning. Inferring the internal model is a crucial ingredient for interpreting neural activities of agents and is beneficial for imitation learning. Here we describe a method to infer an agent's internal model and dynamic beliefs, and apply it to a simulated agent performing a foraging task. We assume the agent behaves rationally according to their understanding of the task and the relevant causal variables that cannot be fully observed. We model this rational solution as a Partially Observable Markov Decision Process (POMDP). However, we allow that the agent may have wrong assumptions about the task, and our method learns these assumptions from the agent's actions. Given the agent's sensory observations and actions, we learn its internal model by maximum likelihood estimation over a set of task-relevant parameters. The Markov property of the POMDP enables us to characterize the transition probabilities between internal states and iteratively estimate the agent's policy using a constrained Expectation-Maximization(EM) algorithm. We validate our method on simulated agents performing suboptimally on a foraging task, and successfully recover the agent's actual model.