 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNetwork Learning with Local Propagation
Paper and Code
May 20, 2018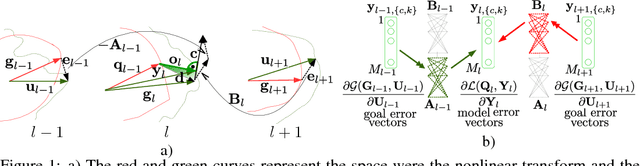
This paper presents a locally decoupled network parameter learning with local propagation. Three elements are taken into account: (i) sets of nonlinear transforms that describe the representations at all nodes, (ii) a local objective at each node related to the corresponding local representation goal, and (iii) a local propagation model that relates the nonlinear error vectors at each node with the goal error vectors from the directly connected nodes. The modeling concepts (i), (ii) and (iii) offer several advantages, including (a) a unified learning principle for any network that is represented as a graph, (b) understanding and interpretation of the local and the global learning dynamics, (c) decoupled and parallel parameter learning, (d) a possibility for learning in infinitely long, multi-path and multi-goal networks. Numerical experiments validate the potential of the learning principle. The preliminary results show advantages in comparison to the state-of-the-art methods, w.r.t. the learning time and the network size while having comparable recognition accuracy.