 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComposite Adaptive Control for Bilateral Teleoperation Systems without Persistency of Excitation
Paper and Code
Apr 18, 2018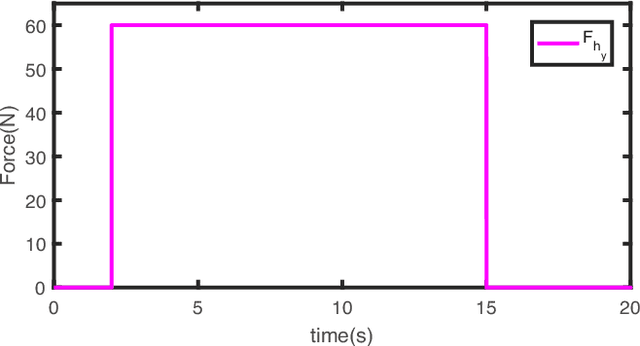
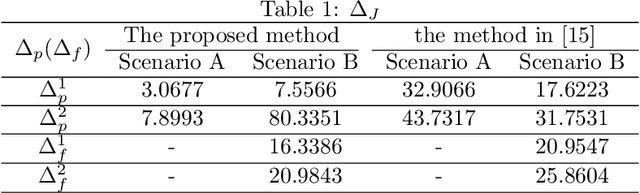
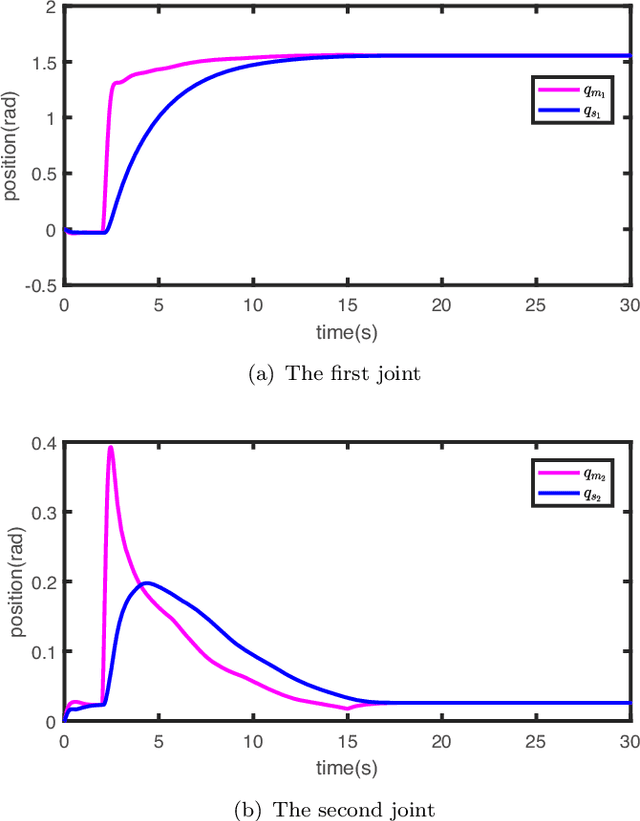
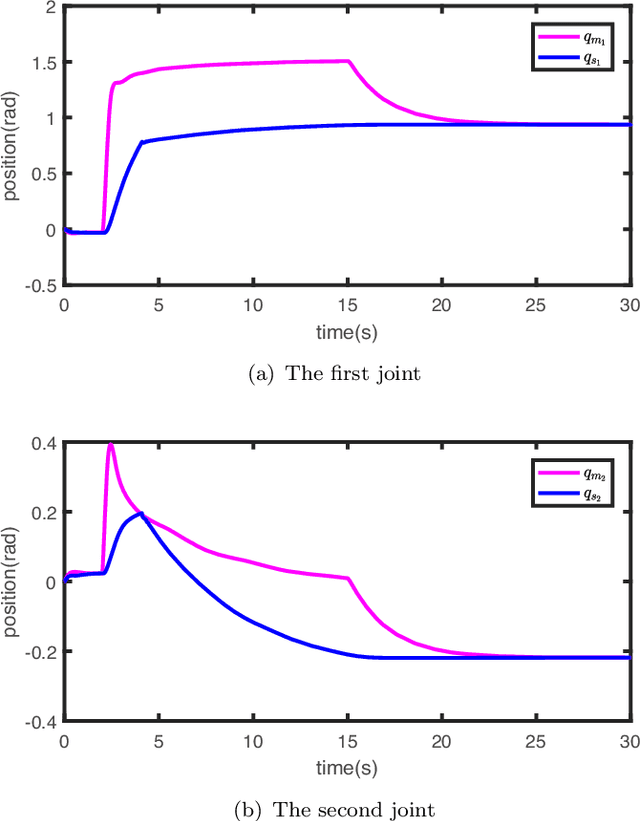
Composite adaptive control schemes, which use both the system tracking errors and the prediction error to drive the update laws, have become widespread in achieving an improvement of system performance. However, a strong persistent-excitation (PE) condition should be satisfied to guarantee the parameter convergence. This paper proposes a novel composite adaptive control to guarantee parameter convergence without PE condition for nonlinear teleoperation systems with dynamic uncertainties and time-varying communication delays. The stability criteria of the closed-loop teleoperation system are given in terms of linear matrix inequalities. New tracking performance measures are proposed to evaluate the position tracking between the master and the slave. Simulation studies are given to show the effectiveness of the proposed method.