 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeForward-Backward Reinforcement Learning
Paper and Code
Mar 27, 2018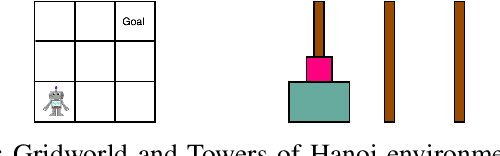
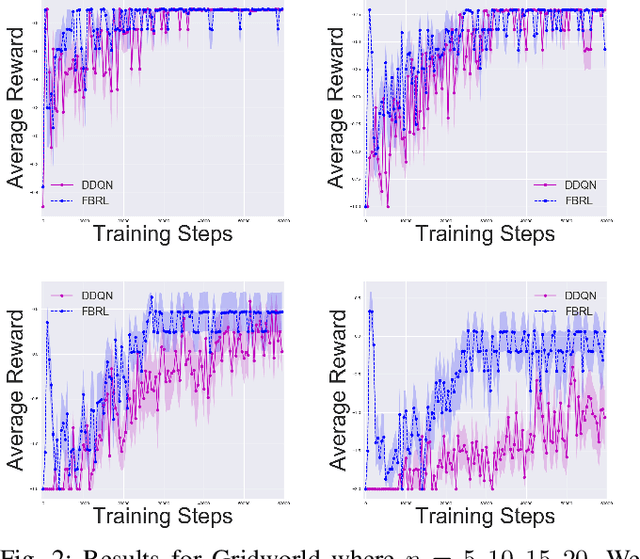
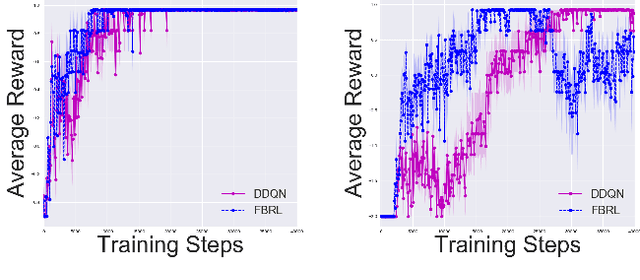
Goals for reinforcement learning problems are typically defined through hand-specified rewards. To design such problems, developers of learning algorithms must inherently be aware of what the task goals are, yet we often require agents to discover them on their own without any supervision beyond these sparse rewards. While much of the power of reinforcement learning derives from the concept that agents can learn with little guidance, this requirement greatly burdens the training process. If we relax this one restriction and endow the agent with knowledge of the reward function, and in particular of the goal, we can leverage backwards induction to accelerate training. To achieve this, we propose training a model to learn to take imagined reversal steps from known goal states. Rather than training an agent exclusively to determine how to reach a goal while moving forwards in time, our approach travels backwards to jointly predict how we got there. We evaluate our work in Gridworld and Towers of Hanoi and empirically demonstrate that it yields better performance than standard DDQN.