 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast 5DOF Needle Tracking in iOCT
Paper and Code
Feb 18, 2018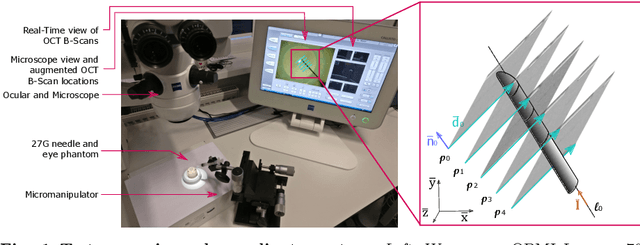
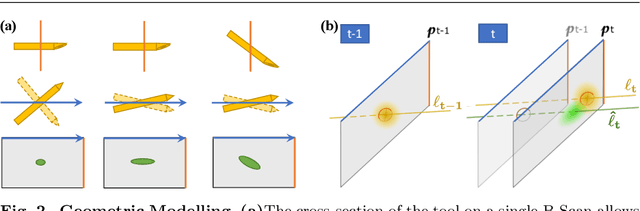
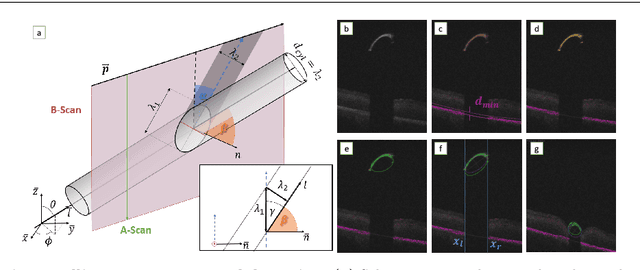
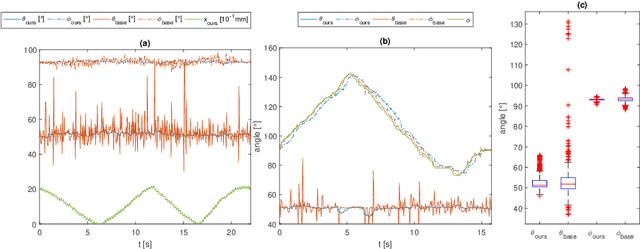
Purpose. Intraoperative Optical Coherence Tomography (iOCT) is an increasingly available imaging technique for ophthalmic microsurgery that provides high-resolution cross-sectional information of the surgical scene. We propose to build on its desirable qualities and present a method for tracking the orientation and location of a surgical needle. Thereby, we enable direct analysis of instrument-tissue interaction directly in OCT space without complex multimodal calibration that would be required with traditional instrument tracking methods. Method. The intersection of the needle with the iOCT scan is detected by a peculiar multi-step ellipse fitting that takes advantage of the directionality of the modality. The geometric modelling allows us to use the ellipse parameters and provide them into a latency aware estimator to infer the 5DOF pose during needle movement. Results. Experiments on phantom data and ex-vivo porcine eyes indicate that the algorithm retains angular precision especially during lateral needle movement and provides a more robust and consistent estimation than baseline methods. Conclusion. Using solely crosssectional iOCT information, we are able to successfully and robustly estimate a 5DOF pose of the instrument in less than 5.5 ms on a CPU.