 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFeature discovery and visualization of robot mission data using convolutional autoencoders and Bayesian nonparametric topic models
Paper and Code
Nov 30, 2017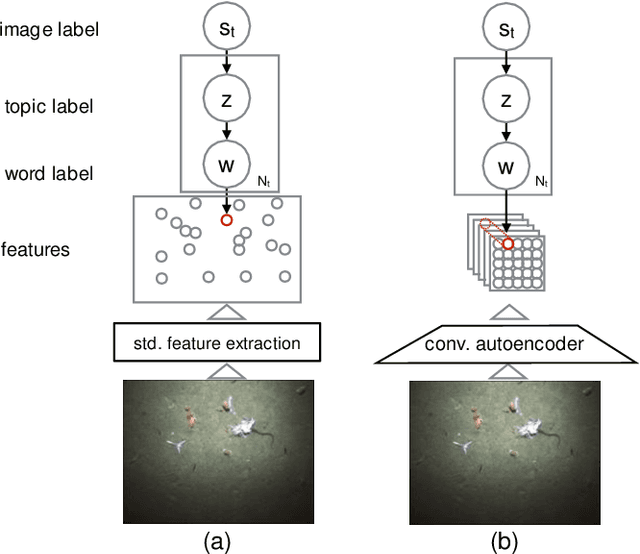
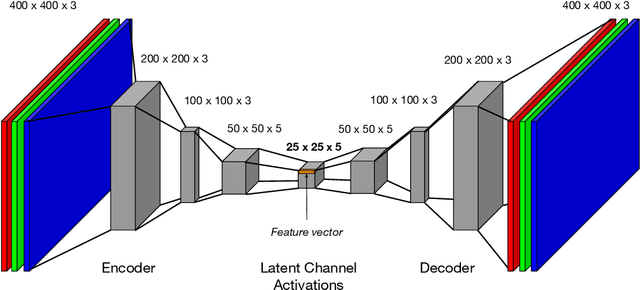
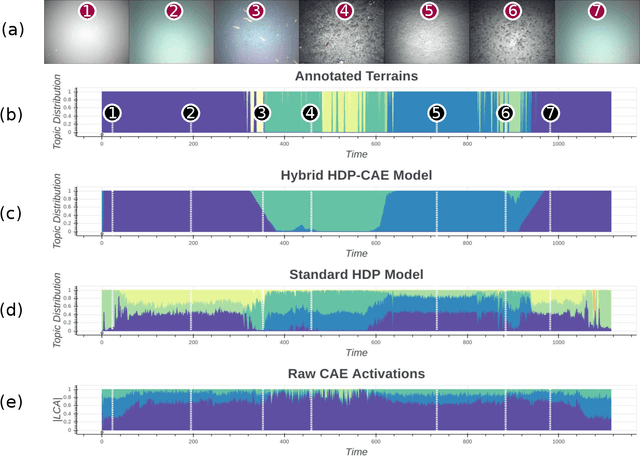
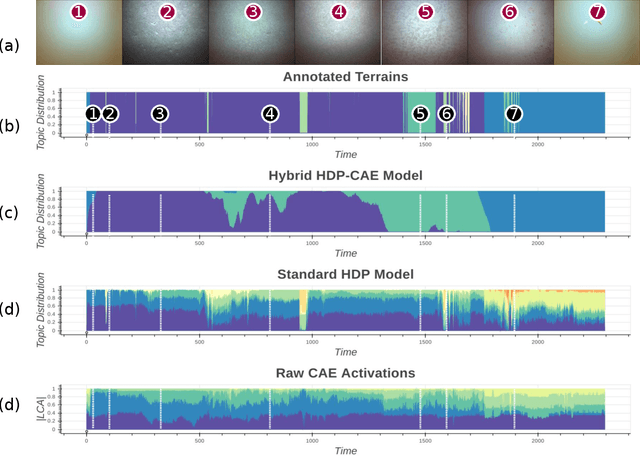
The gap between our ability to collect interesting data and our ability to analyze these data is growing at an unprecedented rate. Recent algorithmic attempts to fill this gap have employed unsupervised tools to discover structure in data. Some of the most successful approaches have used probabilistic models to uncover latent thematic structure in discrete data. Despite the success of these models on textual data, they have not generalized as well to image data, in part because of the spatial and temporal structure that may exist in an image stream. We introduce a novel unsupervised machine learning framework that incorporates the ability of convolutional autoencoders to discover features from images that directly encode spatial information, within a Bayesian nonparametric topic model that discovers meaningful latent patterns within discrete data. By using this hybrid framework, we overcome the fundamental dependency of traditional topic models on rigidly hand-coded data representations, while simultaneously encoding spatial dependency in our topics without adding model complexity. We apply this model to the motivating application of high-level scene understanding and mission summarization for exploratory marine robots. Our experiments on a seafloor dataset collected by a marine robot show that the proposed hybrid framework outperforms current state-of-the-art approaches on the task of unsupervised seafloor terrain characterization.