 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploiting Points and Lines in Regression Forests for RGB-D Camera Relocalization
Paper and Code
Jul 28, 2018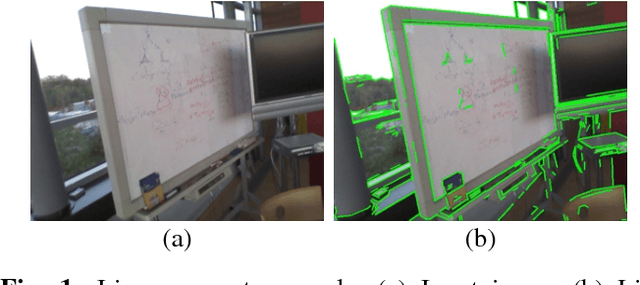
Camera relocalization plays a vital role in many robotics and computer vision tasks, such as global localization, recovery from tracking failure and loop closure detection. Recent random forests based methods exploit randomly sampled pixel comparison features to predict 3D world locations for 2D image locations to guide the camera pose optimization. However, these image features are only sampled randomly in the images, without considering the spatial structures or geometric information, leading to large errors or failure cases with the existence of poorly textured areas or in motion blur. Line segment features are more robust in these environments. In this work, we propose to jointly exploit points and lines within the framework of uncertainty driven regression forests. The proposed approach is thoroughly evaluated on three publicly available datasets against several strong state-of-the-art baselines in terms of several different error metrics. Experimental results prove the efficacy of our method, showing superior or on-par state-of-the-art performance.