 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman Action Forecasting by Learning Task Grammars
Paper and Code
Sep 19, 2017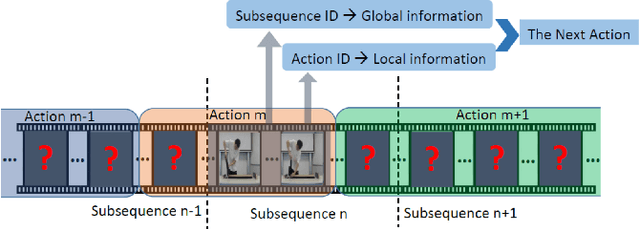
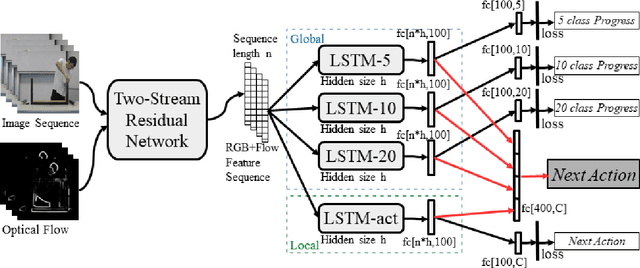
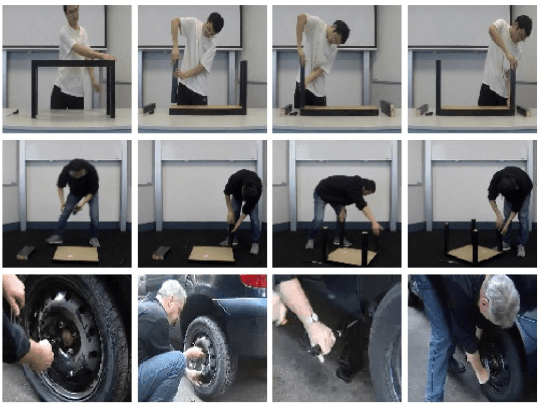
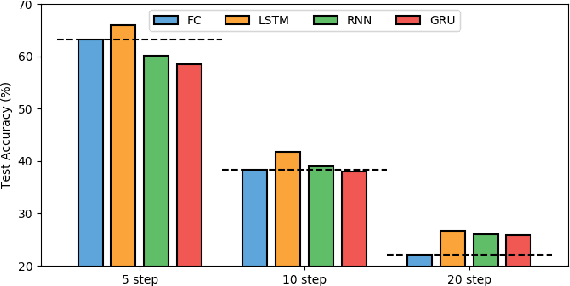
For effective human-robot interaction, it is important that a robotic assistant can forecast the next action a human will consider in a given task. Unfortunately, real-world tasks are often very long, complex, and repetitive; as a result forecasting is not trivial. In this paper, we propose a novel deep recurrent architecture that takes as input features from a two-stream Residual action recognition framework, and learns to estimate the progress of human activities from video sequences -- this surrogate progress estimation task implicitly learns a temporal task grammar with respect to which activities can be localized and forecasted. To learn the task grammar, we propose a stacked LSTM based multi-granularity progress estimation framework that uses a novel cumulative Euclidean loss as objective. To demonstrate the effectiveness of our proposed architecture, we showcase experiments on two challenging robotic assistive tasks, namely (i) assembling an Ikea table from its constituents, and (ii) changing the tires of a car. Our results demonstrate that learning task grammars offers highly discriminative cues improving the forecasting accuracy by more than 9% over the baseline two-stream forecasting model, while also outperforming other competitive schemes.