Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Alarms for Vehicular Collision Detection
Paper and Code
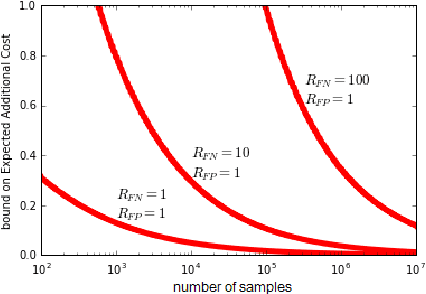
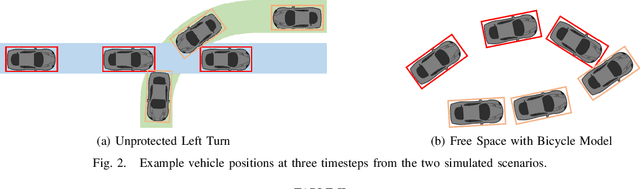
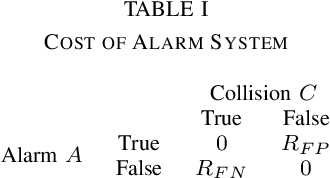

An important application of intelligent vehicles is advance detection of dangerous events such as collisions. This problem is framed as a problem of optimal alarm choice given predictive models for vehicle location and motion. Techniques for real-time collision detection are surveyed and grouped into three classes: random Monte Carlo sampling, faster deterministic approximations, and machine learning models trained by simulation. Theoretical guarantees on the performance of these collision detection techniques are provided where possible, and empirical analysis is provided for two example scenarios. Results validate Monte Carlo sampling as a robust solution despite its simplicity.
View paper on