 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Radio-Inertial Localization and Tracking System with BLE Beacons Prior Maps
Paper and Code
Jul 26, 2018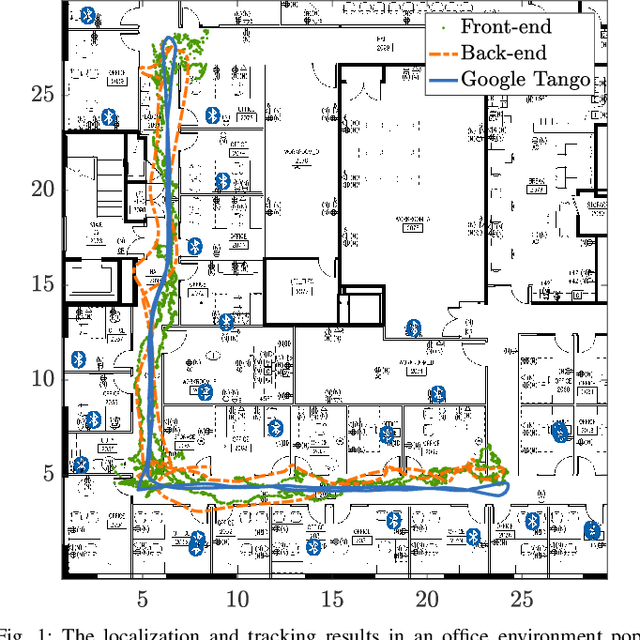
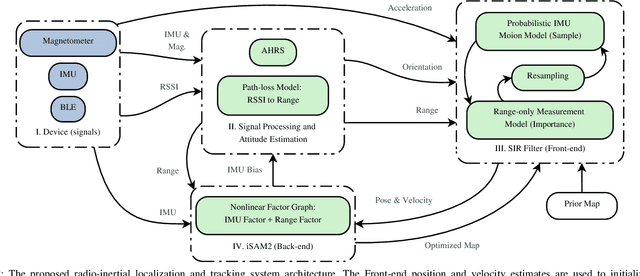
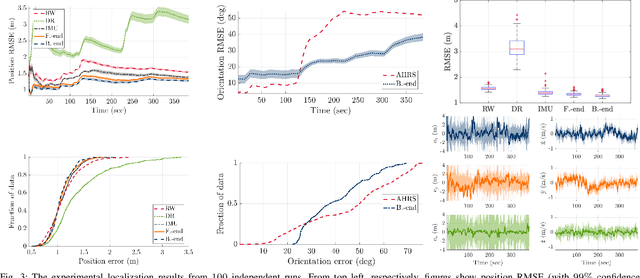

In this paper, we develop a system for the low-cost indoor localization and tracking problem using radio signal strength indicator, Inertial Measurement Unit (IMU), and magnetometer sensors. We develop a novel and simplified probabilistic IMU motion model as the proposal distribution of the sequential Monte-Carlo technique to track the robot trajectory. Our algorithm can globally localize and track a robot with a priori unknown location, given an informative prior map of the Bluetooth Low Energy (BLE) beacons. Also, we formulate the problem as an optimization problem that serves as the Back-end of the algorithm mentioned above (Front-end). Thus, by simultaneously solving for the robot trajectory and the map of BLE beacons, we recover a continuous and smooth trajectory of the robot, corrected locations of the BLE beacons, and the time-varying IMU bias. The evaluations achieved using hardware show that through the proposed closed-loop system the localization performance can be improved; furthermore, the system becomes robust to the error in the map of beacons by feeding back the optimized map to the Front-end.