 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBridging between Computer and Robot Vision through Data Augmentation: a Case Study on Object Recognition
Paper and Code
May 05, 2017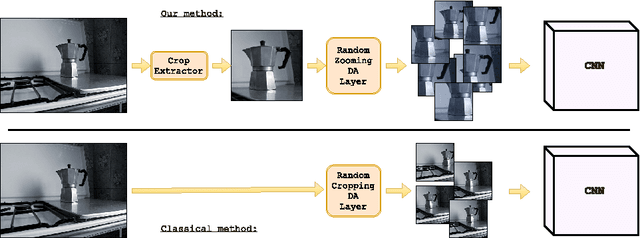
Despite the impressive progress brought by deep network in visual object recognition, robot vision is still far from being a solved problem. The most successful convolutional architectures are developed starting from ImageNet, a large scale collection of images of object categories downloaded from the Web. This kind of images is very different from the situated and embodied visual experience of robots deployed in unconstrained settings. To reduce the gap between these two visual experiences, this paper proposes a simple yet effective data augmentation layer that zooms on the object of interest and simulates the object detection outcome of a robot vision system. The layer, that can be used with any convolutional deep architecture, brings to an increase in object recognition performance of up to 7\%, in experiments performed over three different benchmark databases. Upon acceptance of the paper, our robot data augmentation layer will be made publicly available.