Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCommunication Modalities for Supervised Teleoperation in Highly Dexterous Tasks - Does one size fit all?
Paper and Code
Apr 17, 2017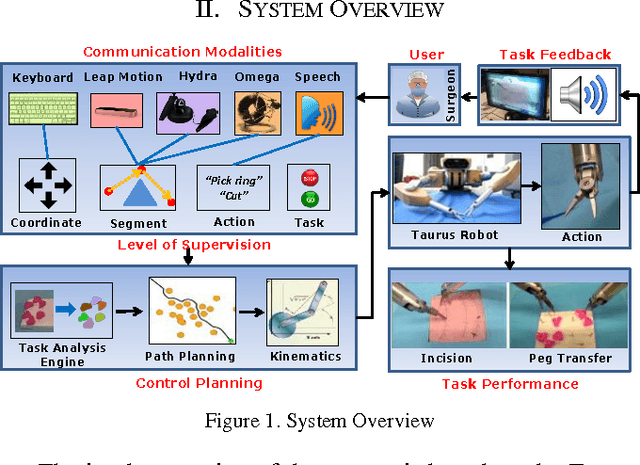
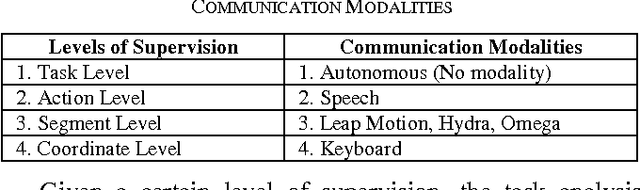
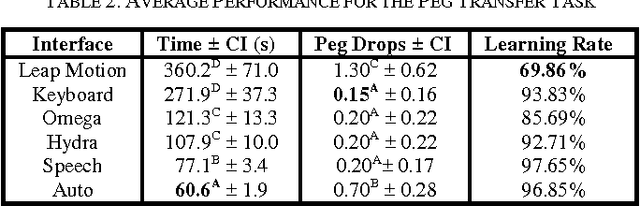
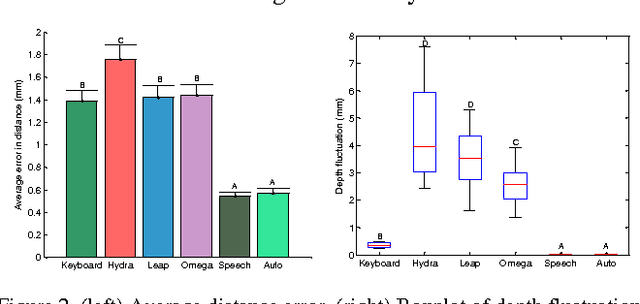
This study tries to explain the connection between communication modalities and levels of supervision in teleoperation during a dexterous task, like surgery. This concept is applied to two surgical related tasks: incision and peg transfer. It was found that as the complexity of the task escalates, the combination linking human supervision with a more expressive modality shows better performance than other combinations of modalities and control. More specifically, in the peg transfer task, the combination of speech modality and action level supervision achieves shorter task completion time (77.1 +- 3.4 s) with fewer mistakes (0.20 +- 0.17 pegs dropped).
* Previously published online at 2nd Workshop on the Role of Human
Sensormotor Control in Surgical Robotics at 2015 IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany
View paper on