Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA New Paradigm for Robotic Dust Collection: Theorems, User Studies, and a Field Study
Paper and Code
Mar 25, 2017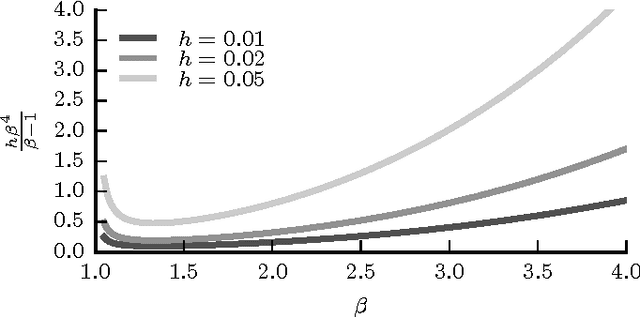
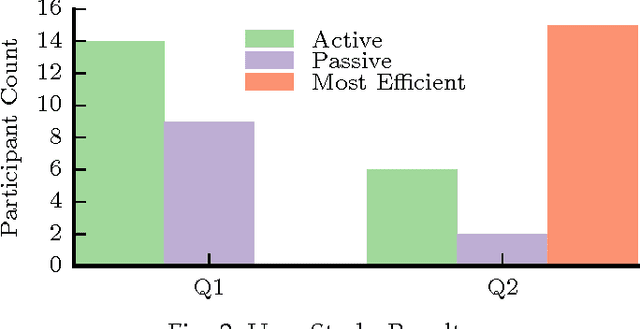
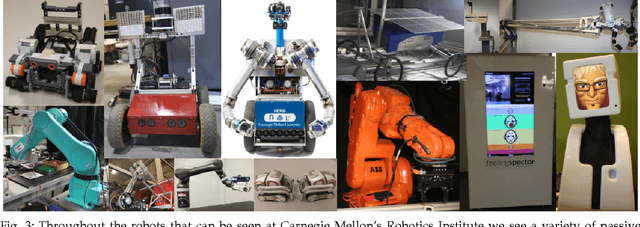
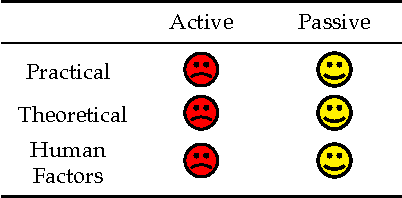
We pioneer a new future in robotic dust collection by introducing passive dust-collecting robots that, unlike their predecessors, do not require locomotion to collect dust. While previous research has exclusively focused on active dust-collecting robots, we show that these robots fail with respect to practical and theoretical aspects, as well as human factors. By contrast, passive robots, through their unconstrained versatility, shine brilliantly in all three metrics. We present a mathematical formalism of both paradigms followed by a user study and field study.
* Submitted to SIGBOVIK
View paper on