 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePneumatic Modelling for Adroit Manipulation Platform
Paper and Code
Mar 05, 2017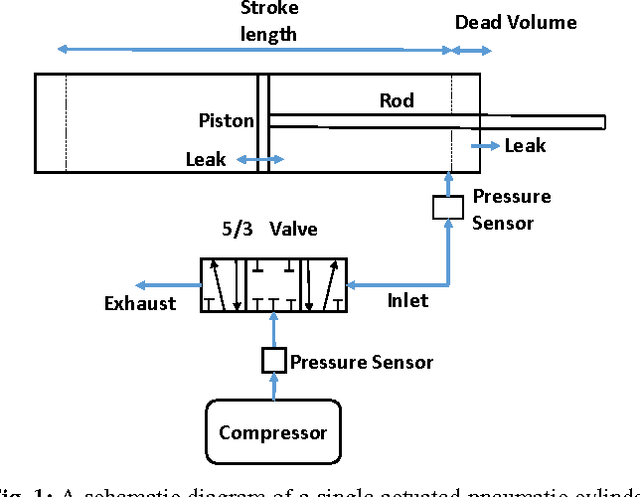
ADROIT Manipulation platform is a pneumatically actuated, tendon driven 28 degree of freedom platform being developed for investigating complex hand manipulation behaviors. ADROIT derives its unique capabilities, necessary to support dynamic and dexterous manipulation, from a custom designed high-performance pneumatic actuation system for tendon-driven hands. The custom pneumatic actuation system is fast, strong, low friction-stiction, compliant and is capable of actuating a shadow hand skeleton faster that human capabilities -- at a unique combination of speed, force, and compliance that has never been achieved before. In this paper, we develop models for the pneumatic muscles of ADROIT and perform a thorough investigation of the various parameters that affect pressure dynamics in a pneumatic system such as, different cylinder types, leakage from valves and cylinders, valve deadzone, input pressure fluctuations etc to improve the model's accuracy.