Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Racing using Learning Model Predictive Control
Paper and Code
Nov 09, 2017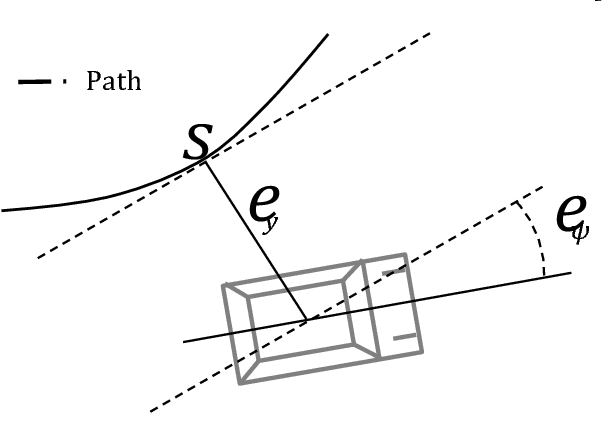
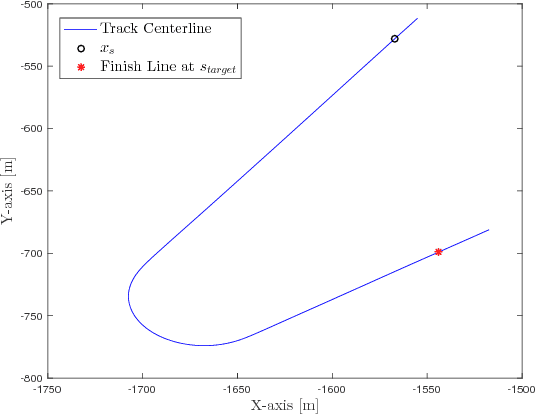
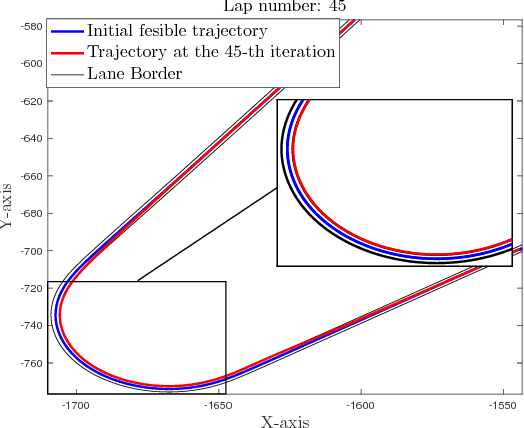
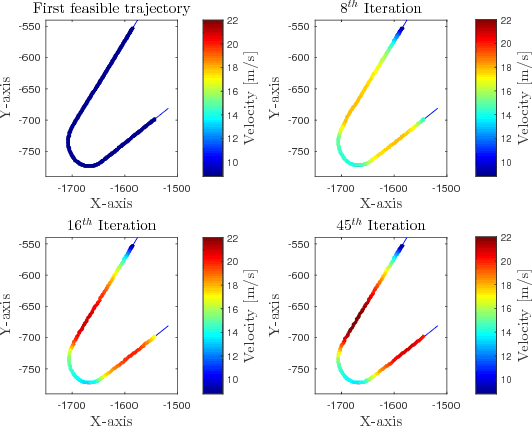
A novel learning Model Predictive Control technique is applied to the autonomous racing problem. The goal of the controller is to minimize the time to complete a lap. The proposed control strategy uses the data from previous laps to improve its performance while satisfying safety requirements. Moreover, a system identification technique is proposed to estimate the vehicle dynamics. Simulation results with the high fidelity simulator software CarSim show the effectiveness of the proposed control scheme.
* Extended version of the paper accepted to ACC
View paper on