 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty in Monotone Co-Design Problems
Paper and Code
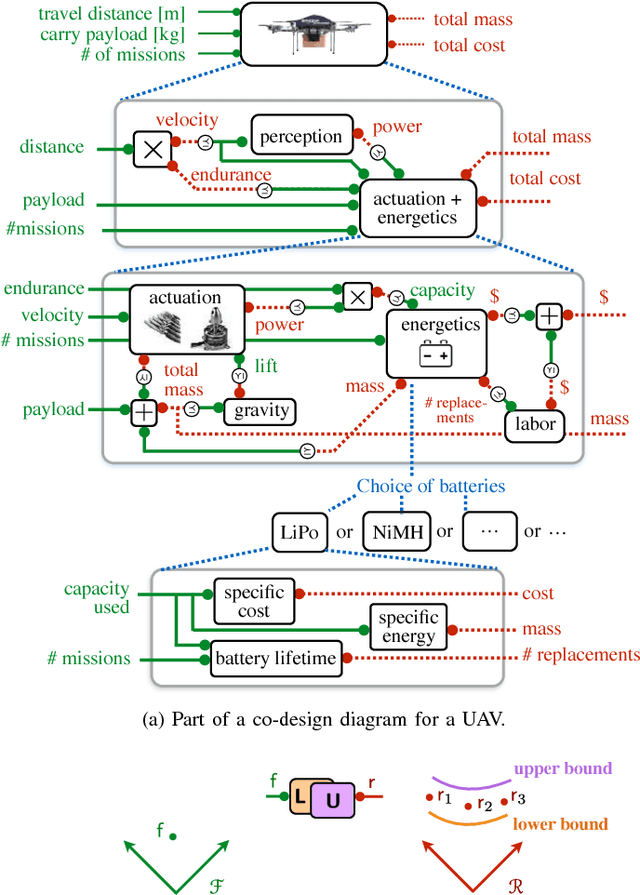
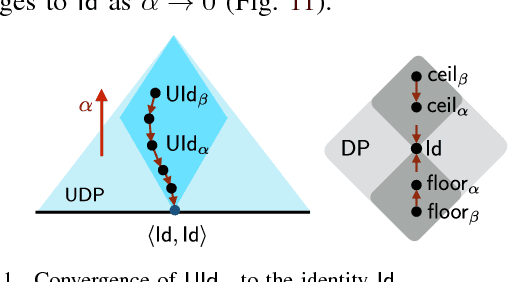
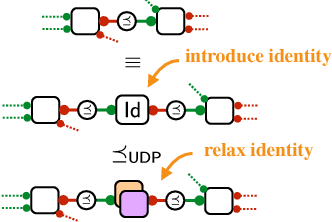
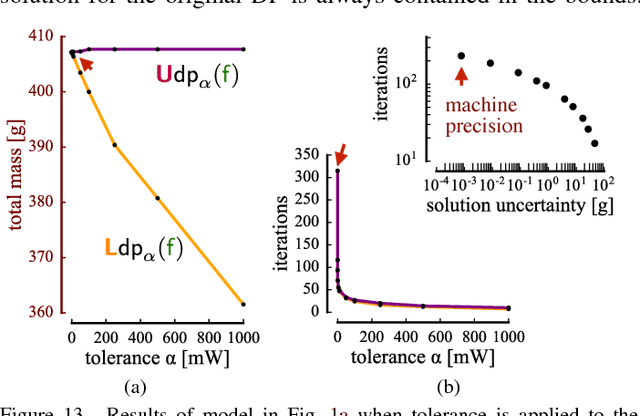
This work contributes to a compositional theory of "co-design" that allows to optimally design a robotic platform. In this framework, the user describes each subsystem as a monotone relation between "functionality" provided and "resources" required. These models can be easily composed to express the co-design constraints among different subsystems. The user then queries the model, to obtain the design with minimal resources usage, subject to a lower bound on the provided functionality. This paper concerns the introduction of uncertainty in the framework. Uncertainty has two roles: first, it allows to deal with limited knowledge of the models; second, it also can be used to generate consistent relaxations of a problem, as the computation requirements can be lowered, should the user accept some uncertainty in the answer.