 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnforcing Biconnectivity in Multi-robot Systems
Paper and Code
Aug 08, 2016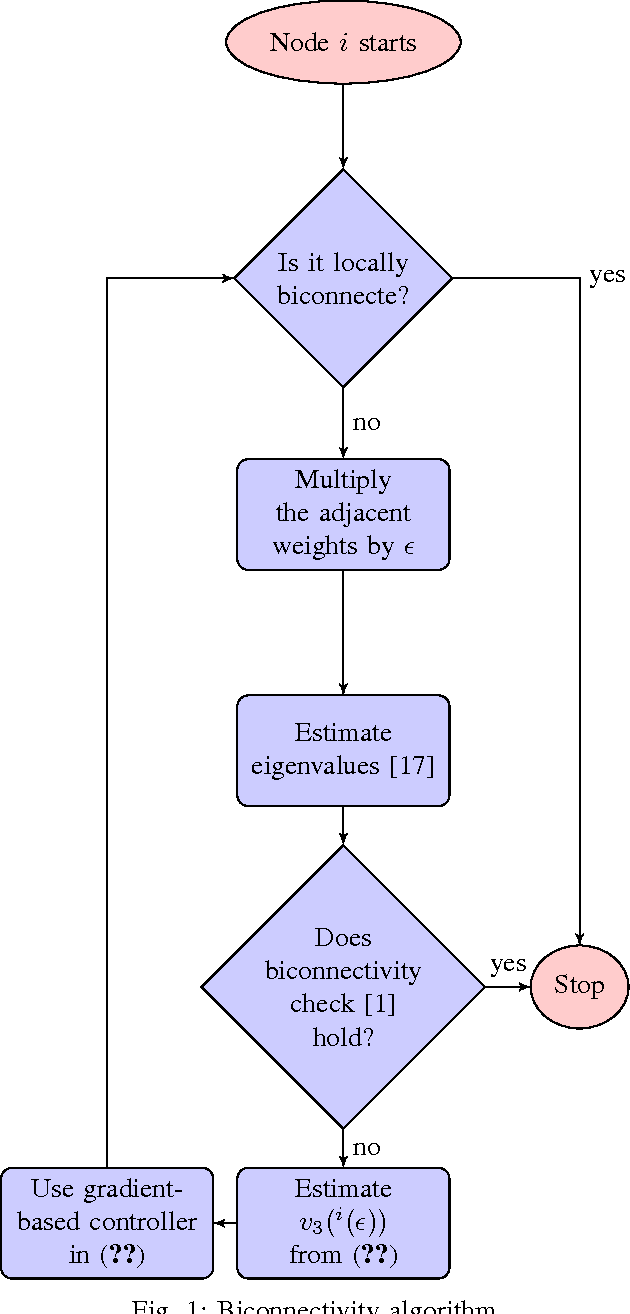
Connectivity maintenance is an essential task in multi-robot systems and it has received a considerable attention during the last years. A connected system can be broken into two or more subsets simply if a single robot fails. A more robust communication can be achieved if the network connectivity is guaranteed in the case of one-robot failures. The resulting network is called biconnected. In \cite{Zareh2016biconnectivitycheck}, we presented a criterion for biconnectivity check, which basically determines a lower bound on the third-smallest eigenvalue of the Laplacian matrix. In this paper, we introduce a decentralized gradient-based protocol to increase the value of the third-smallest eigenvalue of the Laplacian matrix, when the biconnectivity check fails. We also introduce a decentralized algorithm to estimate the eigenvectors of the Laplacian matrix, which are used for defining the gradient. Simulations show the effectiveness of the theoretical findings.