 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaussian Process Autonomous Mapping and Exploration for Range Sensing Mobile Robots
Paper and Code
Oct 18, 2017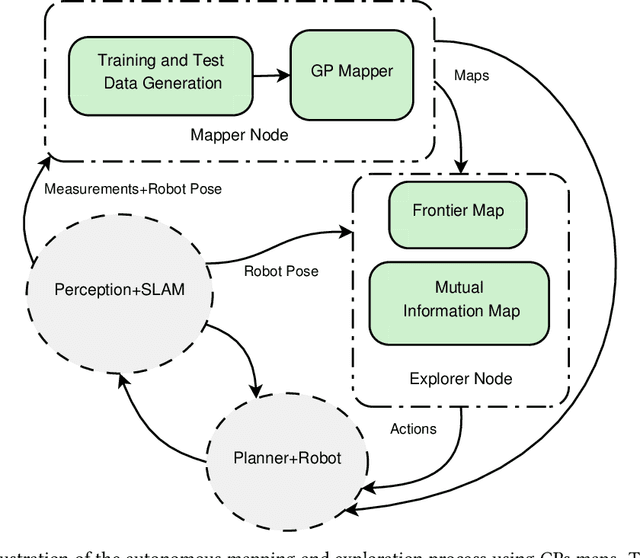
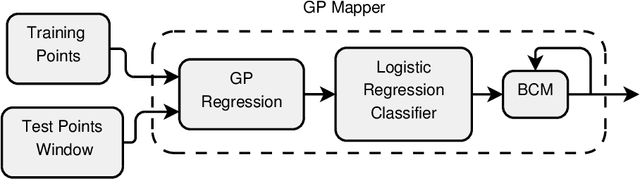
Most of the existing robotic exploration schemes use occupancy grid representations and geometric targets known as frontiers. The occupancy grid representation relies on the assumption of independence between grid cells and ignores structural correlations present in the environment. We develop a Gaussian Processes (GPs) occupancy mapping technique that is computationally tractable for online map building due to its incremental formulation and provides a continuous model of uncertainty over the map spatial coordinates. The standard way to represent geometric frontiers extracted from occupancy maps is to assign binary values to each grid cell. We extend this notion to novel probabilistic frontier maps computed efficiently using the gradient of the GP occupancy map. We also propose a mutual information-based greedy exploration technique built on that representation that takes into account all possible future observations. A major advantage of high-dimensional map inference is the fact that such techniques require fewer observations, leading to a faster map entropy reduction during exploration for map building scenarios. Evaluations using the publicly available datasets show the effectiveness of the proposed framework for robotic mapping and exploration tasks.