 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling Curiosity in a Mobile Robot for Long-Term Autonomous Exploration and Monitoring
Paper and Code
Sep 26, 2015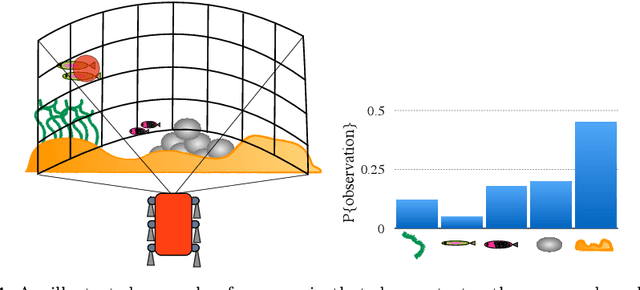

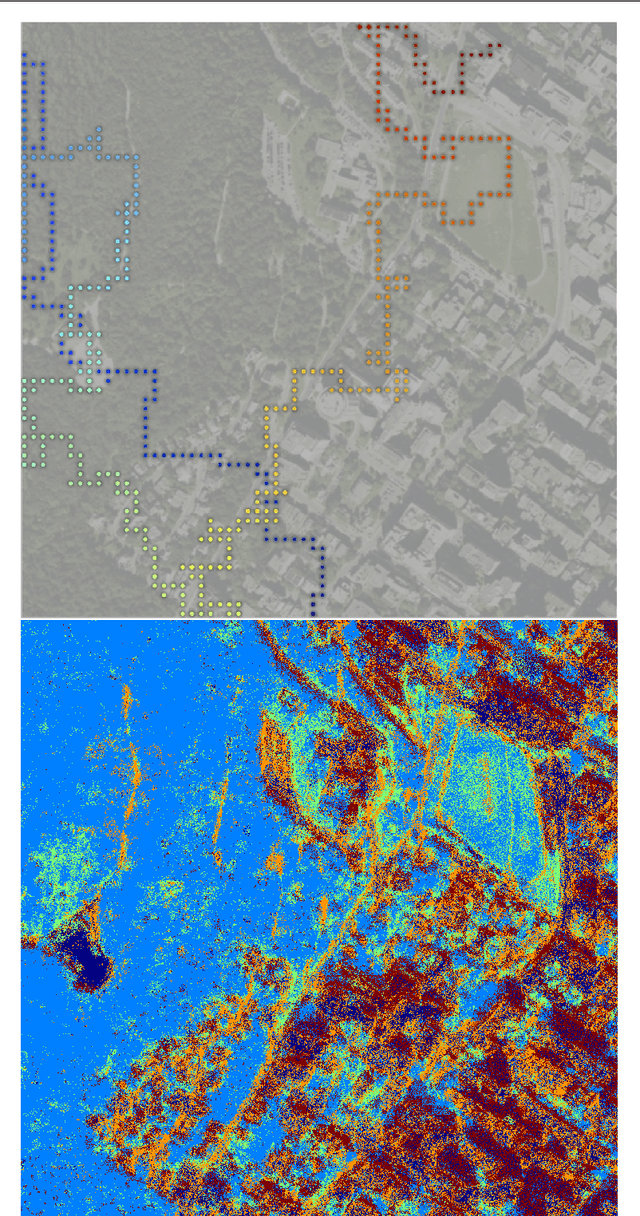
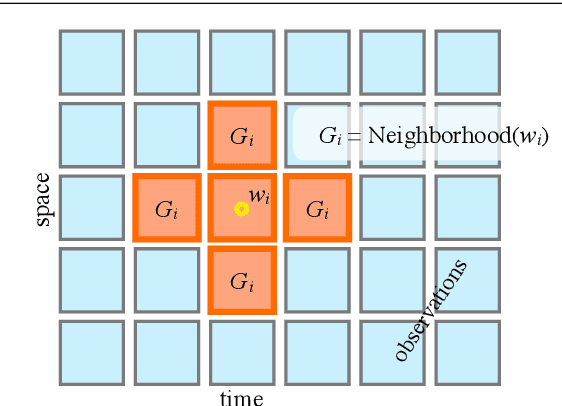
This paper presents a novel approach to modeling curiosity in a mobile robot, which is useful for monitoring and adaptive data collection tasks, especially in the context of long term autonomous missions where pre-programmed missions are likely to have limited utility. We use a realtime topic modeling technique to build a semantic perception model of the environment, using which, we plan a path through the locations in the world with high semantic information content. The life-long learning behavior of the proposed perception model makes it suitable for long-term exploration missions. We validate the approach using simulated exploration experiments using aerial and underwater data, and demonstrate an implementation on the Aqua underwater robot in a variety of scenarios. We find that the proposed exploration paths that are biased towards locations with high topic perplexity, produce better terrain models with high discriminative power. Moreover, we show that the proposed algorithm implemented on Aqua robot is able to do tasks such as coral reef inspection, diver following, and sea floor exploration, without any prior training or preparation.