 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Policy Search for Lifelong Reinforcement Learning with Sublinear Regret
Paper and Code
May 21, 2015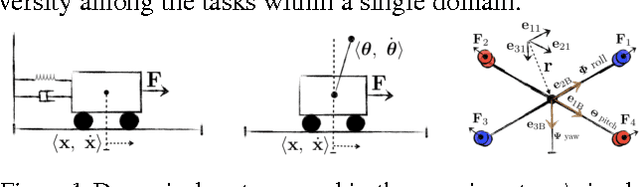
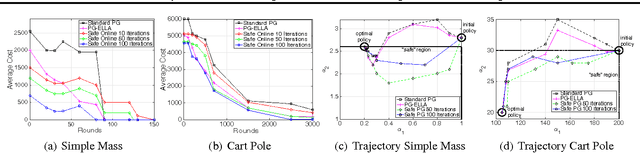
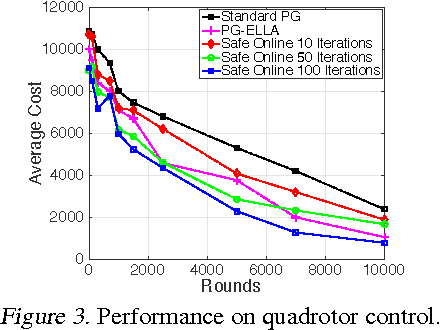
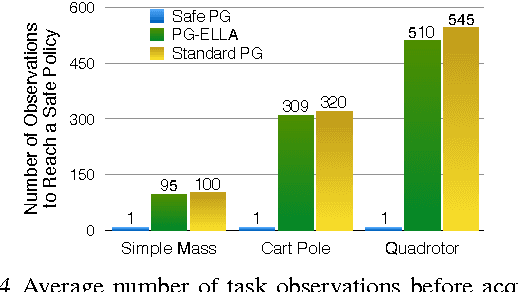
Lifelong reinforcement learning provides a promising framework for developing versatile agents that can accumulate knowledge over a lifetime of experience and rapidly learn new tasks by building upon prior knowledge. However, current lifelong learning methods exhibit non-vanishing regret as the amount of experience increases and include limitations that can lead to suboptimal or unsafe control policies. To address these issues, we develop a lifelong policy gradient learner that operates in an adversarial set- ting to learn multiple tasks online while enforcing safety constraints on the learned policies. We demonstrate, for the first time, sublinear regret for lifelong policy search, and validate our algorithm on several benchmark dynamical systems and an application to quadrotor control.