Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFeature Engineering for Map Matching of Low-Sampling-Rate GPS Trajectories in Road Network
Paper and Code
Sep 02, 2014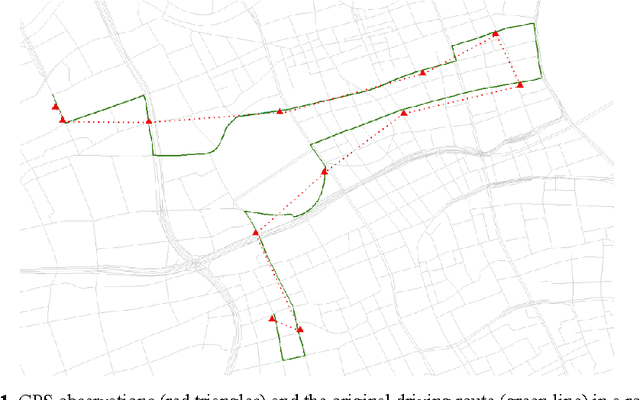

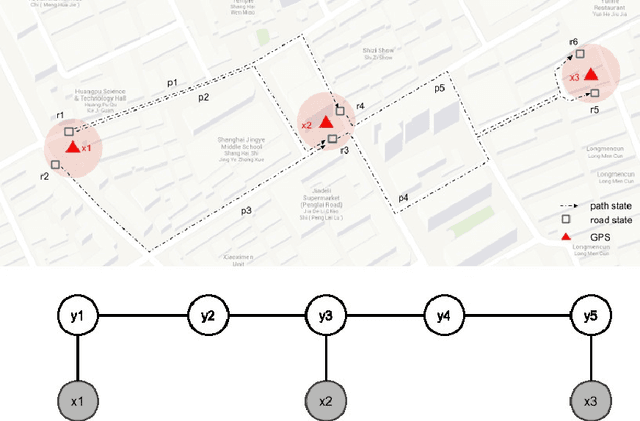
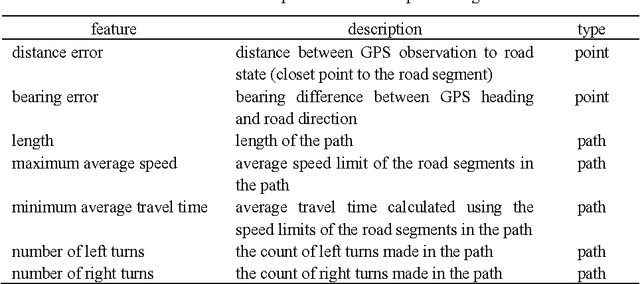
Map matching of GPS trajectories from a sequence of noisy observations serves the purpose of recovering the original routes in a road network. In this work in progress, we attempt to share our experience of feature construction in a spatial database by reporting our ongoing experiment of feature extrac-tion in Conditional Random Fields (CRFs) for map matching. Our preliminary results are obtained from real-world taxi GPS trajectories.
* ECML/PKDD14 workshop on Machine Learning for Urban Sensor
Data(SenseML)
View paper on