 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning with Noisy Probabilistic Relational Rules
Paper and Code
Jan 16, 2014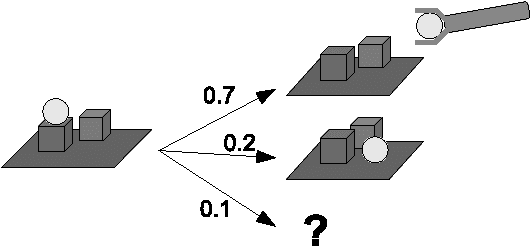
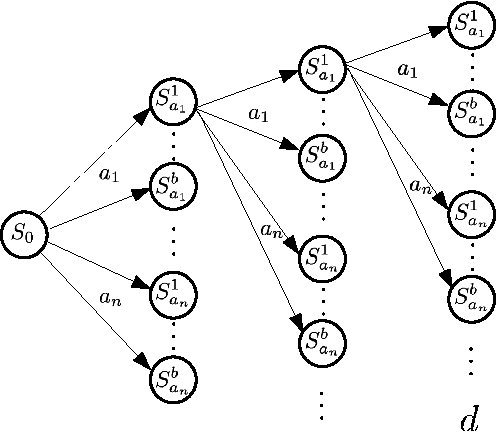
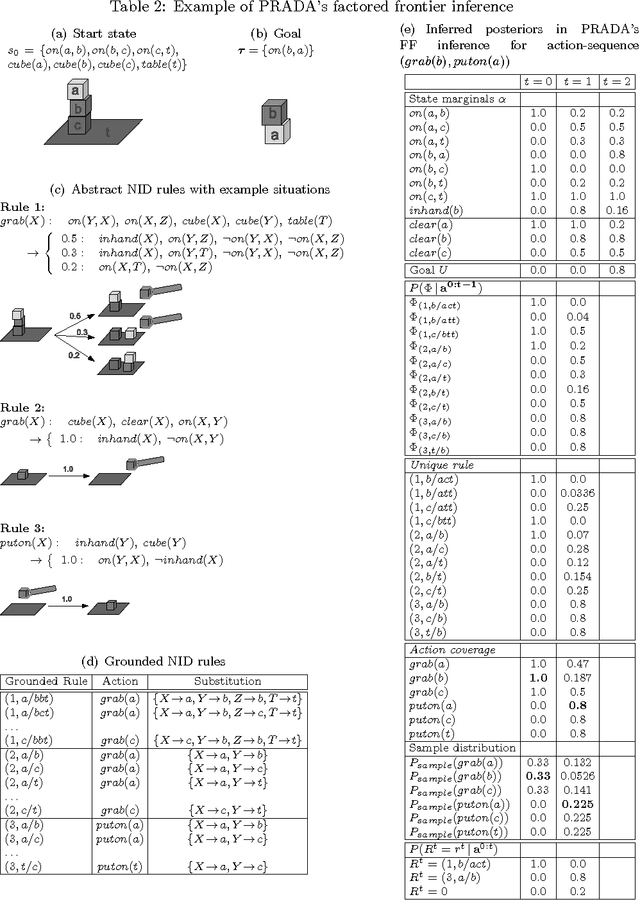
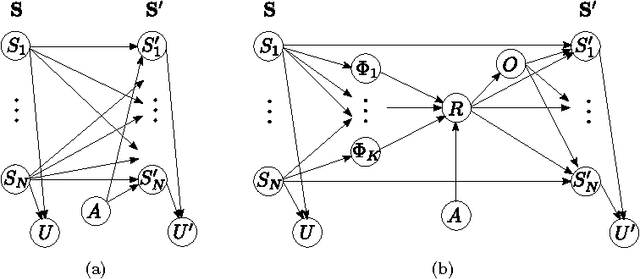
Noisy probabilistic relational rules are a promising world model representation for several reasons. They are compact and generalize over world instantiations. They are usually interpretable and they can be learned effectively from the action experiences in complex worlds. We investigate reasoning with such rules in grounded relational domains. Our algorithms exploit the compactness of rules for efficient and flexible decision-theoretic planning. As a first approach, we combine these rules with the Upper Confidence Bounds applied to Trees (UCT) algorithm based on look-ahead trees. Our second approach converts these rules into a structured dynamic Bayesian network representation and predicts the effects of action sequences using approximate inference and beliefs over world states. We evaluate the effectiveness of our approaches for planning in a simulated complex 3D robot manipulation scenario with an articulated manipulator and realistic physics and in domains of the probabilistic planning competition. Empirical results show that our methods can solve problems where existing methods fail.