 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTheta*: Any-Angle Path Planning on Grids
Paper and Code
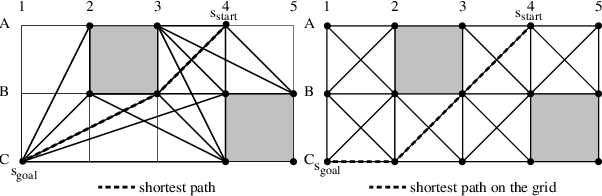
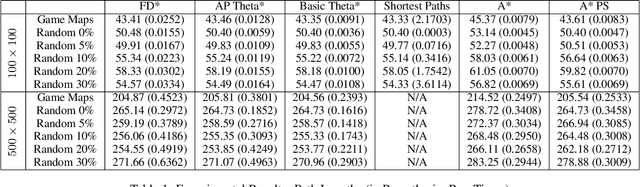
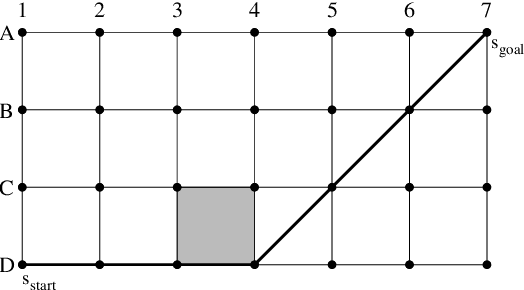
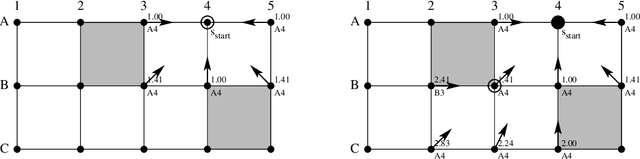
Grids with blocked and unblocked cells are often used to represent terrain in robotics and video games. However, paths formed by grid edges can be longer than true shortest paths in the terrain since their headings are artificially constrained. We present two new correct and complete any-angle path-planning algorithms that avoid this shortcoming. Basic Theta* and Angle-Propagation Theta* are both variants of A* that propagate information along grid edges without constraining paths to grid edges. Basic Theta* is simple to understand and implement, fast and finds short paths. However, it is not guaranteed to find true shortest paths. Angle-Propagation Theta* achieves a better worst-case complexity per vertex expansion than Basic Theta* by propagating angle ranges when it expands vertices, but is more complex, not as fast and finds slightly longer paths. We refer to Basic Theta* and Angle-Propagation Theta* collectively as Theta*. Theta* has unique properties, which we analyze in detail. We show experimentally that it finds shorter paths than both A* with post-smoothed paths and Field D* (the only other version of A* we know of that propagates information along grid edges without constraining paths to grid edges) with a runtime comparable to that of A* on grids. Finally, we extend Theta* to grids that contain unblocked cells with non-uniform traversal costs and introduce variants of Theta* which provide different tradeoffs between path length and runtime.