 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImmuno-inspired robotic applications: a review
Paper and Code
Feb 20, 2012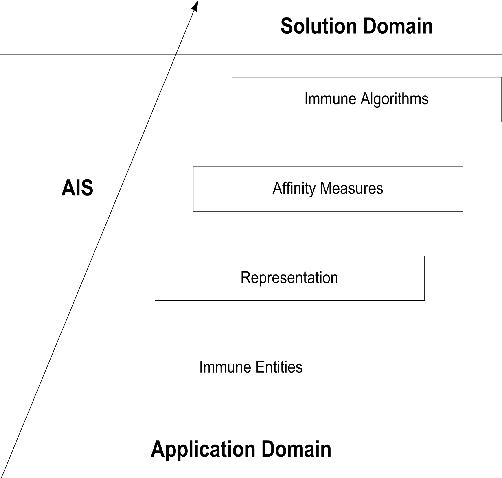
Artificial immune systems primarily mimic the adaptive nature of biological immune functions. Their ability to adapt to varying pathogens makes such systems a suitable choice for various robotic applications. Generally, AIS-based robotic applications map local instantaneous sensory information into either an antigen or a co-stimulatory signal, according to the choice of representation schema. Algorithms then use relevant immune functions to output either evolved antibodies or maturity of dendritic cells, in terms of actuation signals. It is observed that researchers, in an attempt to solve the problem in hand, do not try to replicate the biological immunity but select necessary immune functions instead, resulting in an ad-hoc manner these applications are reported. Authors, therefore, present a comprehensive review of immuno-inspired robotic applications in an attempt to categorize them according to underlying immune definitions. Implementation details are tabulated in terms of corresponding mathematical expressions and their representation schema that include binary, real or hybrid data. Limitations of reported applications are also identified in light of modern immunological interpretations. As a result of this study, authors suggest a renewed focus on innate immunity and also emphasize that immunological representations should benefit from robot embodiment and must be extended to include modern trends.