 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFormal-language-theoretic Optimal Path Planning For Accommodation of Amortized Uncertainties and Dynamic Effects
Paper and Code
Aug 23, 2010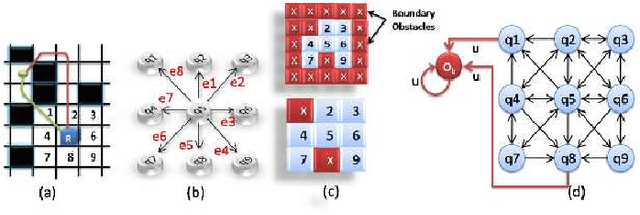

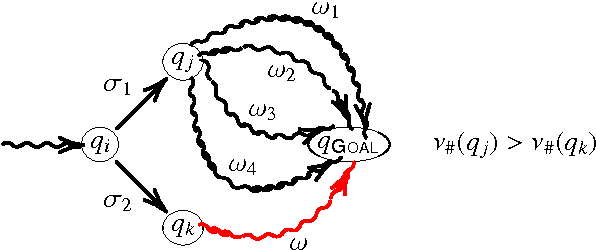
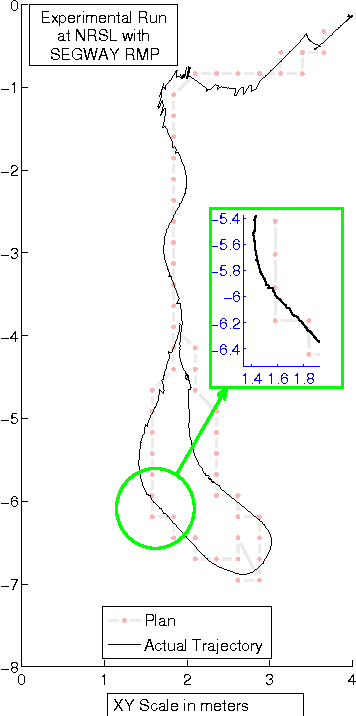
We report a globally-optimal approach to robotic path planning under uncertainty, based on the theory of quantitative measures of formal languages. A significant generalization to the language-measure-theoretic path planning algorithm $\nustar$ is presented that explicitly accounts for average dynamic uncertainties and estimation errors in plan execution. The notion of the navigation automaton is generalized to include probabilistic uncontrollable transitions, which account for uncertainties by modeling and planning for probabilistic deviations from the computed policy in the course of execution. The planning problem is solved by casting it in the form of a performance maximization problem for probabilistic finite state automata. In essence we solve the following optimization problem: Compute the navigation policy which maximizes the probability of reaching the goal, while simultaneously minimizing the probability of hitting an obstacle. Key novelties of the proposed approach include the modeling of uncertainties using the concept of uncontrollable transitions, and the solution of the ensuing optimization problem using a highly efficient search-free combinatorial approach to maximize quantitative measures of probabilistic regular languages. Applicability of the algorithm in various models of robot navigation has been shown with experimental validation on a two-wheeled mobile robotic platform (SEGWAY RMP 200) in a laboratory environment.