 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Five Points Pose Problem : A New and Accurate Solution Adapted to any Geometric Configuration
Paper and Code
Jul 16, 2008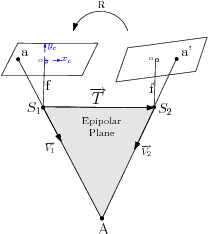
The goal of this paper is to estimate directly the rotation and translation between two stereoscopic images with the help of five homologous points. The methodology presented does not mix the rotation and translation parameters, which is comparably an important advantage over the methods using the well-known essential matrix. This results in correct behavior and accuracy for situations otherwise known as quite unfavorable, such as planar scenes, or panoramic sets of images (with a null base length), while providing quite comparable results for more "standard" cases. The resolution of the algebraic polynomials resulting from the modeling of the coplanarity constraint is made with the help of powerful algebraic solver tools (the Groebner bases and the Rational Univariate Representation).