 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA New Solution to the Relative Orientation Problem using only 3 Points and the Vertical Direction
May 25, 2009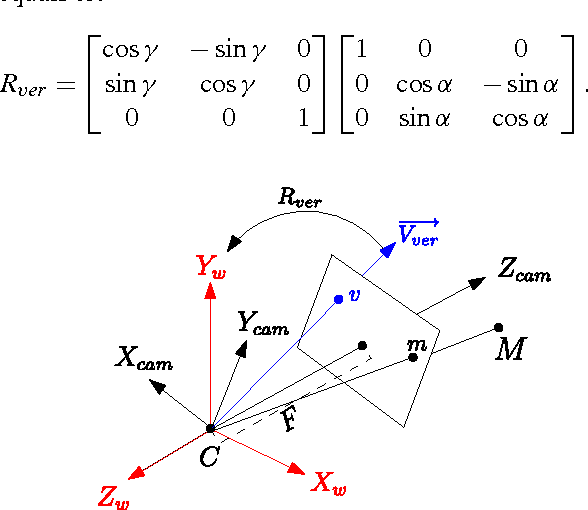
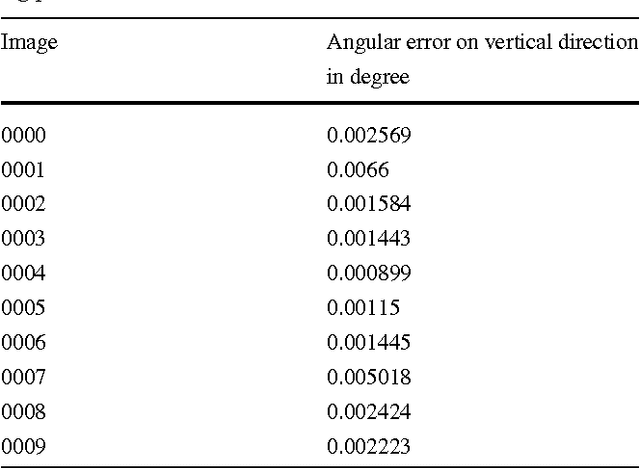
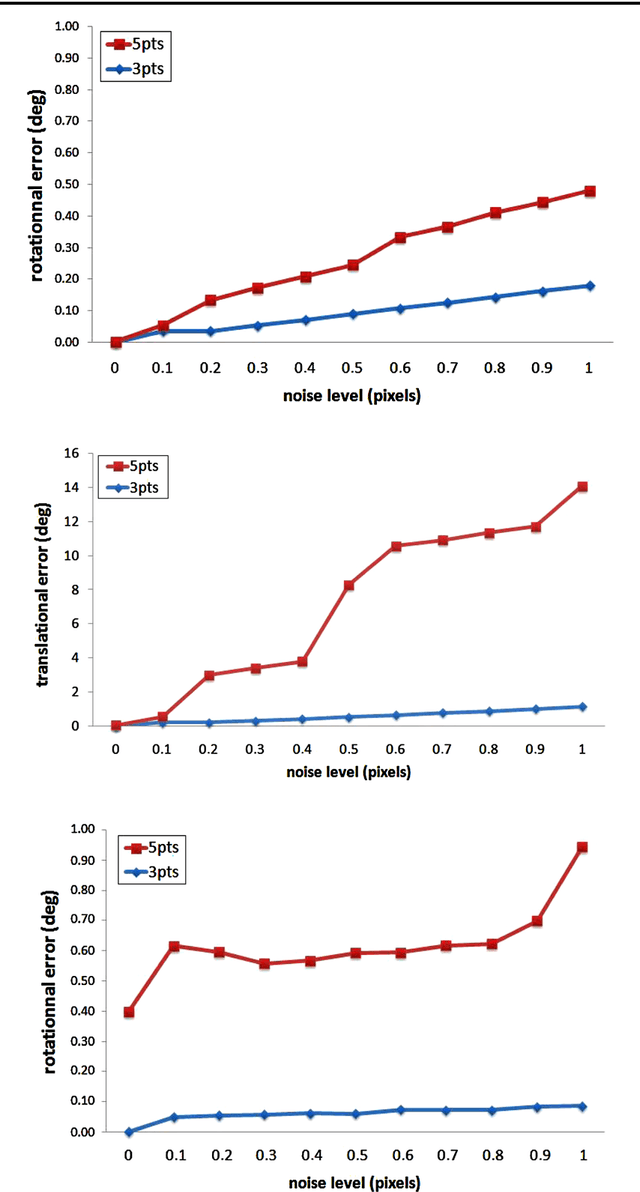
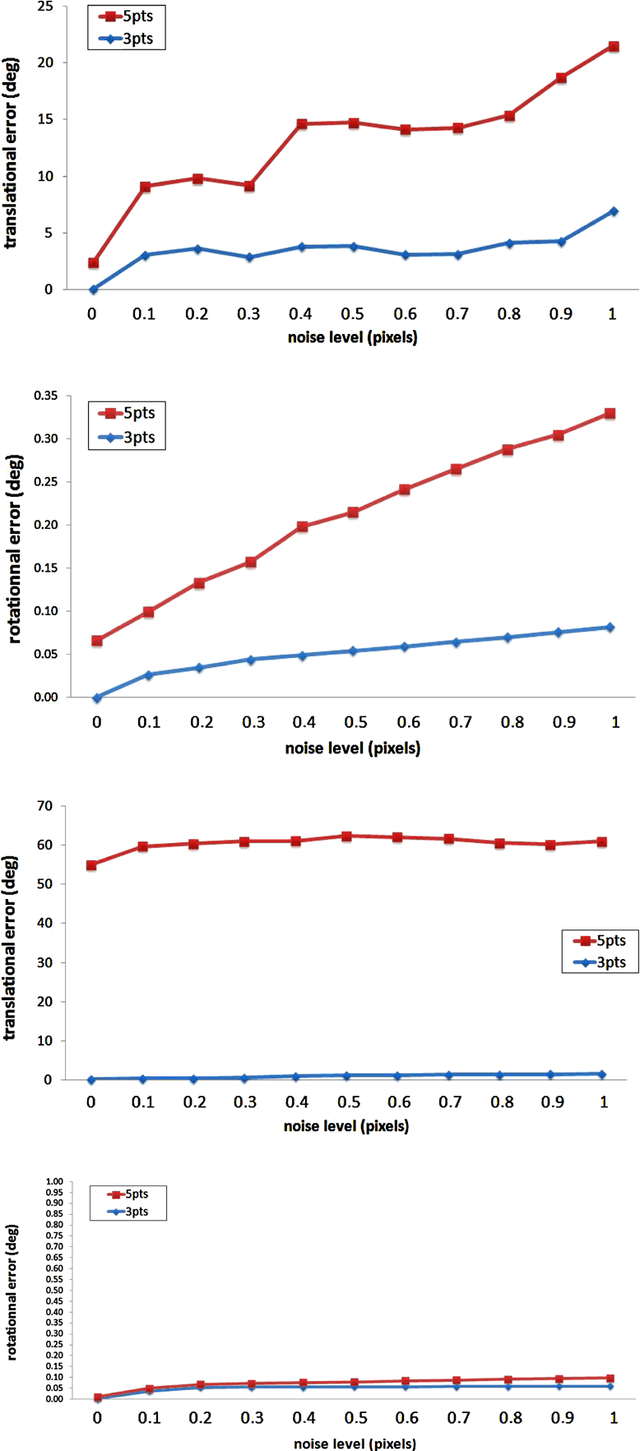
This paper presents a new method to recover the relative pose between two images, using three points and the vertical direction information. The vertical direction can be determined in two ways: 1- using direct physical measurement like IMU (inertial measurement unit), 2- using vertical vanishing point. This knowledge of the vertical direction solves 2 unknowns among the 3 parameters of the relative rotation, so that only 3 homologous points are requested to position a couple of images. Rewriting the coplanarity equations leads to a simpler solution. The remaining unknowns resolution is performed by an algebraic method using Grobner bases. The elements necessary to build a specific algebraic solver are given in this paper, allowing for a real-time implementation. The results on real and synthetic data show the efficiency of this method.
The Five Points Pose Problem : A New and Accurate Solution Adapted to any Geometric Configuration
Jul 16, 2008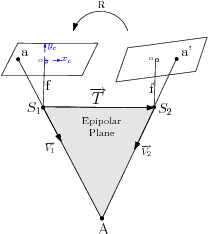
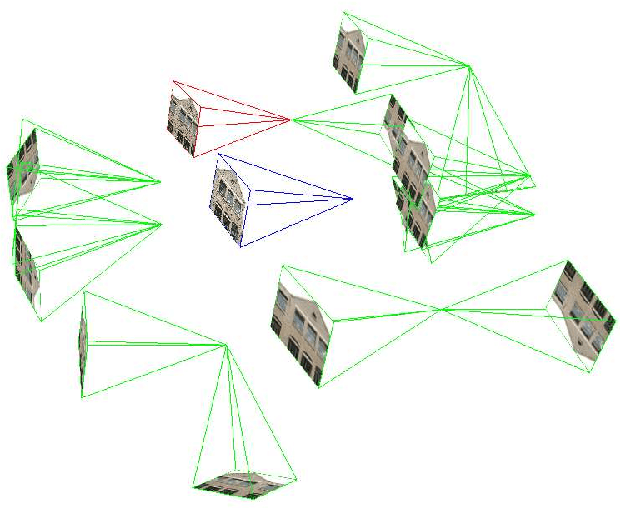
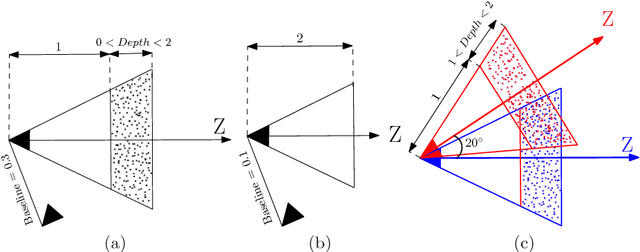
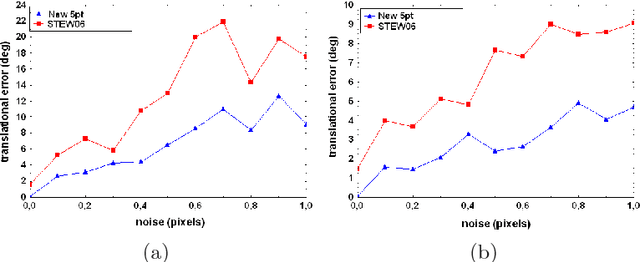
The goal of this paper is to estimate directly the rotation and translation between two stereoscopic images with the help of five homologous points. The methodology presented does not mix the rotation and translation parameters, which is comparably an important advantage over the methods using the well-known essential matrix. This results in correct behavior and accuracy for situations otherwise known as quite unfavorable, such as planar scenes, or panoramic sets of images (with a null base length), while providing quite comparable results for more "standard" cases. The resolution of the algebraic polynomials resulting from the modeling of the coplanarity constraint is made with the help of powerful algebraic solver tools (the Groebner bases and the Rational Univariate Representation).