 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Commonsense Driven Knowledge Refinements for Scene Graph Generation
Jun 04, 2026Learning-driven Scene Graph Generation (SGG) models excel on frequent relation types but degrade sharply under annotation sparsity, failing to capture reliable visual commonsense knowledge. We propose a model-agnostic, semantically-guided knowledge refinement framework that systematically mines commonsense-grounded constraints from training data - capturing spatial, functional, and qualitative relational regularities - and uses general declarative commonsense reasoning to correct and refine ranked SGG predictions at inference time. The framework requires no manual rule authoring, no model retraining, and transfers across datasets and architectures. On three standard benchmarks, we obtain consistent improvements over strong baselines, demonstrating that structured visual commonsense reasoning over deep scene semantics is a practical and effective complement to purely learning-based scene graph generation.
A Qualitative Model to Reason about Object Rotations (QOR) applied to solve the Cube Comparison Test (CCT)
Jan 13, 2026This paper presents a Qualitative model for Reasoning about Object Rotations (QOR) which is applied to solve the Cube Comparison Test (CCT) by Ekstrom et al. (1976). A conceptual neighborhood graph relating the Rotation movement to the Location change and the Orientation change (CNGRLO) of the features on the cube sides has been built and it produces composition tables to calculate inferences for reasoning about rotations.
GraSP-VLA: Graph-based Symbolic Action Representation for Long-Horizon Planning with VLA Policies
Nov 06, 2025Deploying autonomous robots that can learn new skills from demonstrations is an important challenge of modern robotics. Existing solutions often apply end-to-end imitation learning with Vision-Language Action (VLA) models or symbolic approaches with Action Model Learning (AML). On the one hand, current VLA models are limited by the lack of high-level symbolic planning, which hinders their abilities in long-horizon tasks. On the other hand, symbolic approaches in AML lack generalization and scalability perspectives. In this paper we present a new neuro-symbolic approach, GraSP-VLA, a framework that uses a Continuous Scene Graph representation to generate a symbolic representation of human demonstrations. This representation is used to generate new planning domains during inference and serves as an orchestrator for low-level VLA policies, scaling up the number of actions that can be reproduced in a row. Our results show that GraSP-VLA is effective for modeling symbolic representations on the task of automatic planning domain generation from observations. In addition, results on real-world experiments show the potential of our Continuous Scene Graph representation to orchestrate low-level VLA policies in long-horizon tasks.
Proceedings of the 2nd Symposium on Problem-solving, Creativity and Spatial Reasoning in Cognitive Systems, ProSocrates 2017
Jan 14, 2019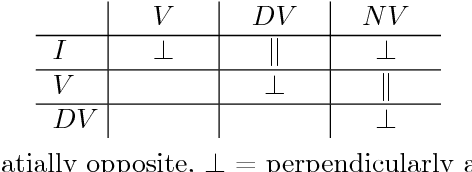
This book contains the accepted papers at ProSocrates 2017 Symposium: Problem-solving,Creativity and Spatial Reasoning in Cognitive Systems. ProSocrates 2017 symposium was held at the Hansewissenschaftkolleg (HWK) of Advanced Studies in Delmenhorst, 20-21July 2017. This was the second edition of this symposium which aims to bring together researchers interested in spatial reasoning, problem solving and creativity.