 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePack it in: Packing into Partially Filled Containers Through Contact
Feb 15, 2026The automation of warehouse operations is crucial for improving productivity and reducing human exposure to hazardous environments. One operation frequently performed in warehouses is bin-packing where items need to be placed into containers, either for delivery to a customer, or for temporary storage in the warehouse. Whilst prior bin-packing works have largely been focused on packing items into empty containers and have adopted collision-free strategies, it is often the case that containers will already be partially filled with items, often in suboptimal arrangements due to transportation about a warehouse. This paper presents a contact-aware packing approach that exploits purposeful interactions with previously placed objects to create free space and enable successful placement of new items. This is achieved by using a contact-based multi-object trajectory optimizer within a model predictive controller, integrated with a physics-aware perception system that estimates object poses even during inevitable occlusions, and a method that suggests physically-feasible locations to place the object inside the container.
Real-Time Physics-Based Object Pose Tracking during Non-Prehensile Manipulation
Nov 24, 2022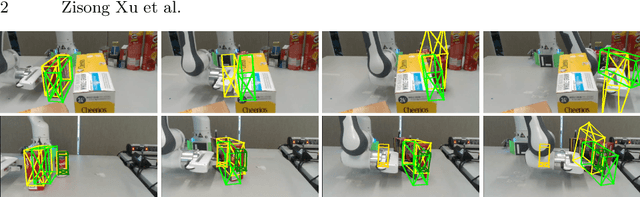


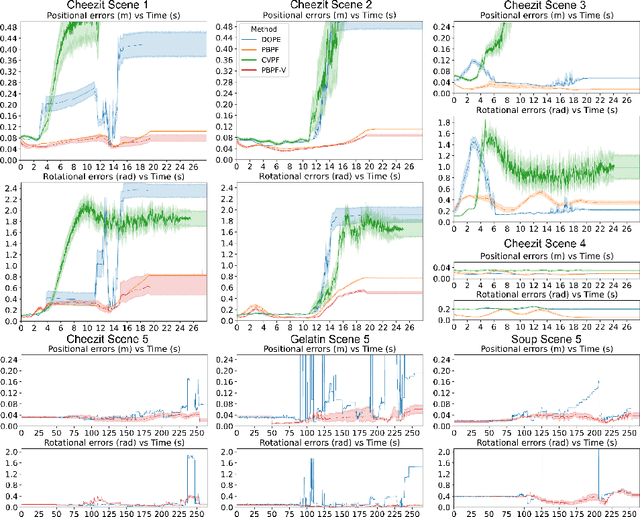
We propose a method to track the 6D pose of an object over time, while the object is under non-prehensile manipulation by a robot. At any given time during the manipulation of the object, we assume access to the robot joint controls and an image from a camera looking at the scene. We use the robot joint controls to perform a physics-based prediction of how the object might be moving. We then combine this prediction with the observation coming from the camera, to estimate the object pose as accurately as possible. We use a particle filtering approach to combine the control information with the visual information. We compare the proposed method with two baselines: (i) using only an image-based pose estimation system at each time-step, and (ii) a particle filter which does not perform the computationally expensive physics predictions, but assumes the object moves with constant velocity. Our results show that making physics-based predictions is worth the computational cost, resulting in more accurate tracking, and estimating object pose even when the object is not clearly visible to the camera.