 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSalience-Invariant Consistent Policy Learning for Generalization in Visual Reinforcement Learning
Feb 12, 2025Generalizing policies to unseen scenarios remains a critical challenge in visual reinforcement learning, where agents often overfit to the specific visual observations of the training environment. In unseen environments, distracting pixels may lead agents to extract representations containing task-irrelevant information. As a result, agents may deviate from the optimal behaviors learned during training, thereby hindering visual generalization.To address this issue, we propose the Salience-Invariant Consistent Policy Learning (SCPL) algorithm, an efficient framework for zero-shot generalization. Our approach introduces a novel value consistency module alongside a dynamics module to effectively capture task-relevant representations. The value consistency module, guided by saliency, ensures the agent focuses on task-relevant pixels in both original and perturbed observations, while the dynamics module uses augmented data to help the encoder capture dynamic- and reward-relevant representations. Additionally, our theoretical analysis highlights the importance of policy consistency for generalization. To strengthen this, we introduce a policy consistency module with a KL divergence constraint to maintain consistent policies across original and perturbed observations.Extensive experiments on the DMC-GB, Robotic Manipulation, and CARLA benchmarks demonstrate that SCPL significantly outperforms state-of-the-art methods in terms of generalization. Notably, SCPL achieves average performance improvements of 14\%, 39\%, and 69\% in the challenging DMC video hard setting, the Robotic hard setting, and the CARLA benchmark, respectively.Project Page: https://sites.google.com/view/scpl-rl.
NeuronsGym: A Hybrid Framework and Benchmark for Robot Tasks with Sim2Real Policy Learning
Feb 07, 2023The rise of embodied AI has greatly improved the possibility of general mobile agent systems. At present, many evaluation platforms with rich scenes, high visual fidelity and various application scenarios have been developed. In this paper, we present a hybrid framework named NeuronsGym that can be used for policy learning of robot tasks, covering a simulation platform for training policy, and a physical system for studying sim2real problems. Unlike most current single-task, slow-moving robotic platforms, our framework provides agile physical robots with a wider range of speeds, and can be employed to train robotic navigation and confrontation policies. At the same time, in order to evaluate the safety of robot navigation, we propose a safety-weighted path length (SFPL) to improve the safety evaluation in the current mobile robot navigation. Based on this platform, we build a new benchmark for navigation and confrontation tasks under this platform by comparing the current mainstream sim2real methods, and hold the 2022 IEEE Conference on Games (CoG) RoboMaster sim2real challenge. We release the codes of this framework\footnote{\url{https://github.com/DRL-CASIA/NeuronsGym}} and hope that this platform can promote the development of more flexible and agile general mobile agent algorithms.
MVM3Det: A Novel Method for Multi-view Monocular 3D Detection
Sep 22, 2021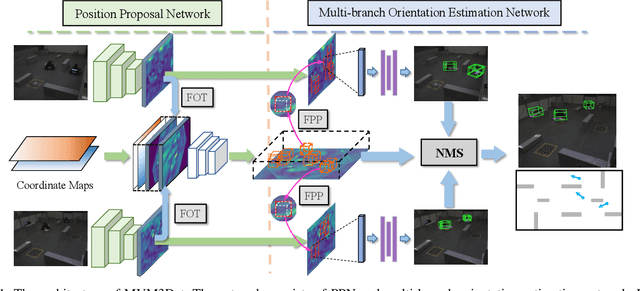
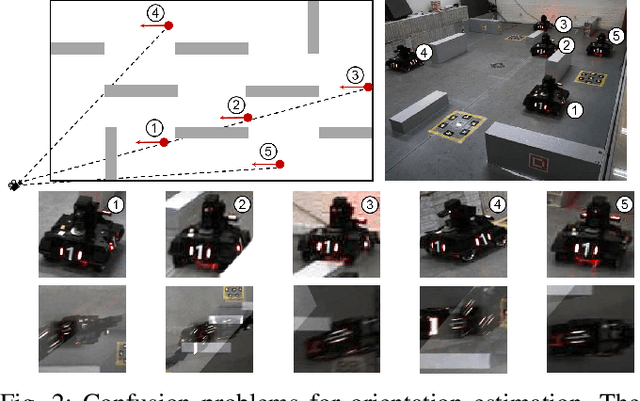
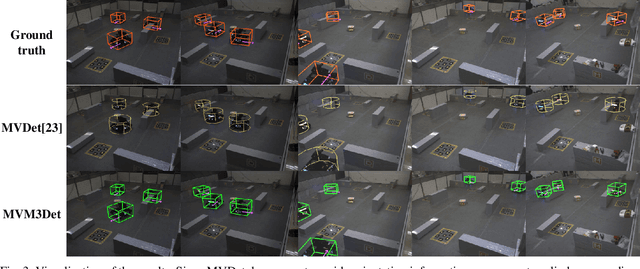
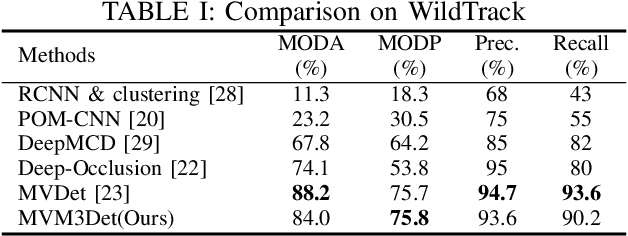
Monocular 3D object detection encounters occlusion problems in many application scenarios, such as traffic monitoring, pedestrian monitoring, etc., which leads to serious false negative. Multi-view object detection effectively solves this problem by combining data from different perspectives. However, due to label confusion and feature confusion, the orientation estimation of multi-view 3D object detection is intractable, which is important for object tracking and intention prediction. In this paper, we propose a novel multi-view 3D object detection method named MVM3Det which simultaneously estimates the 3D position and orientation of the object according to the multi-view monocular information. The method consists of two parts: 1) Position proposal network, which integrates the features from different perspectives into consistent global features through feature orthogonal transformation to estimate the position. 2) Multi-branch orientation estimation network, which introduces feature perspective pooling to overcome the two confusion problems during the orientation estimation. In addition, we present a first dataset for multi-view 3D object detection named MVM3D. Comparing with State-Of-The-Art (SOTA) methods on our dataset and public dataset WildTrack, our method achieves very competitive results.