 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGlobal path preference and local response: A reward decomposition approach for network path choice analysis in the presence of locally perceived attributes
Jul 14, 2023This study performs an attribute-level analysis of the global and local path preferences of network travelers. To this end, a reward decomposition approach is proposed and integrated into a link-based recursive (Markovian) path choice model. The approach decomposes the instantaneous reward function associated with each state-action pair into the global utility, a function of attributes globally perceived from anywhere in the network, and the local utility, a function of attributes that are only locally perceived from the current state. Only the global utility then enters the value function of each state, representing the future expected utility toward the destination. This global-local path choice model with decomposed reward functions allows us to analyze to what extent and which attributes affect the global and local path choices of agents. Moreover, unlike most adaptive path choice models, the proposed model can be estimated based on revealed path observations (without the information of plans) and as efficiently as deterministic recursive path choice models. The model was applied to the real pedestrian path choice observations in an urban street network where the green view index was extracted as a visual street quality from Google Street View images. The result revealed that pedestrians locally perceive and react to the visual street quality, rather than they have the pre-trip global perception on it. Furthermore, the simulation results using the estimated models suggested the importance of location selection of interventions when policy-related attributes are only locally perceived by travelers.
E-commerce users' preferences for delivery options
Dec 30, 2022Many e-commerce marketplaces offer their users fast delivery options for free to meet the increasing needs of users, imposing an excessive burden on city logistics. Therefore, understanding e-commerce users' preference for delivery options is a key to designing logistics policies. To this end, this study designs a stated choice survey in which respondents are faced with choice tasks among different delivery options and time slots, which was completed by 4,062 users from the three major metropolitan areas in Japan. To analyze the data, mixed logit models capturing taste heterogeneity as well as flexible substitution patterns have been estimated. The model estimation results indicate that delivery attributes including fee, time, and time slot size are significant determinants of the delivery option choices. Associations between users' preferences and socio-demographic characteristics, such as age, gender, teleworking frequency and the presence of a delivery box, were also suggested. Moreover, we analyzed two willingness-to-pay measures for delivery, namely, the value of delivery time savings (VODT) and the value of time slot shortening (VOTS), and applied a non-semiparametric approach to estimate their distributions in a data-oriented manner. Although VODT has a large heterogeneity among respondents, the estimated median VODT is 25.6 JPY/day, implying that more than half of the respondents would wait an additional day if the delivery fee were increased by only 26 JPY, that is, they do not necessarily need a fast delivery option but often request it when cheap or almost free. Moreover, VOTS was found to be low, distributed with the median of 5.0 JPY/hour; that is, users do not highly value the reduction in time slot size in monetary terms. These findings on e-commerce users' preferences can help in designing levels of service for last-mile delivery to significantly improve its efficiency.
Capturing positive utilities during the estimation of recursive logit models: A prism-based approach
Apr 04, 2022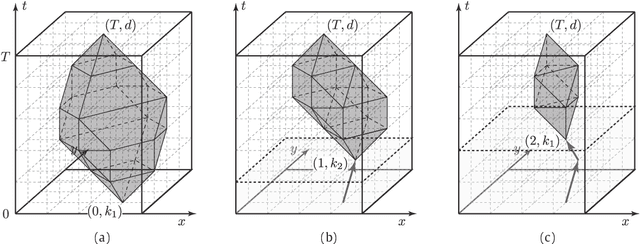
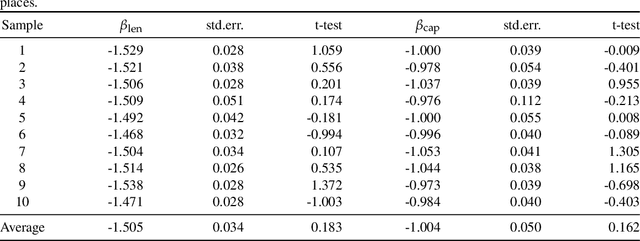
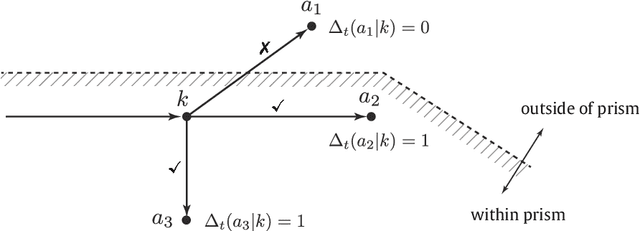

Although the recursive logit (RL) model has been recently popular and has led to many applications and extensions, an important numerical issue with respect to the evaluation of value functions remains unsolved. This issue is particularly significant for model estimation, during which the parameters are updated every iteration and may violate the model feasible condition. To solve this numerical issue, this paper proposes a prism-constrained RL (Prism-RL) model that implicitly restricts the path set by the prism constraint defined based upon a state-extended network representation. Providing a set of numerical experiments, we show that the Prism-RL model succeeds in the stable estimation regardless of the initial and true parameter values and is able to capture positive utilities. In the real application to a pedestrian network, we found the positive effect of street green presence on pedestrians. Moreover, the Prism-RL model achieved higher goodness of fit than the RL model, implying that the Prism-RL model can also describe more realistic route choice behavior.