 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContact-Safe Reinforcement Learning with ProMP Reparameterization and Energy Awareness
Nov 17, 2025Reinforcement learning (RL) approaches based on Markov Decision Processes (MDPs) are predominantly applied in the robot joint space, often relying on limited task-specific information and partial awareness of the 3D environment. In contrast, episodic RL has demonstrated advantages over traditional MDP-based methods in terms of trajectory consistency, task awareness, and overall performance in complex robotic tasks. Moreover, traditional step-wise and episodic RL methods often neglect the contact-rich information inherent in task-space manipulation, especially considering the contact-safety and robustness. In this work, contact-rich manipulation tasks are tackled using a task-space, energy-safe framework, where reliable and safe task-space trajectories are generated through the combination of Proximal Policy Optimization (PPO) and movement primitives. Furthermore, an energy-aware Cartesian Impedance Controller objective is incorporated within the proposed framework to ensure safe interactions between the robot and the environment. Our experimental results demonstrate that the proposed framework outperforms existing methods in handling tasks on various types of surfaces in 3D environments, achieving high success rates as well as smooth trajectories and energy-safe interactions.
GeoPF: Infusing Geometry into Potential Fields for Reactive Planning in Non-trivial Environments
May 26, 2025


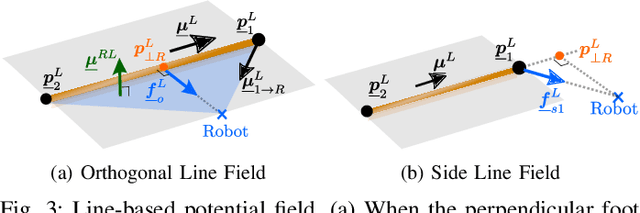
Reactive intelligence remains one of the cornerstones of versatile robotics operating in cluttered, dynamic, and human-centred environments. Among reactive approaches, potential fields (PF) continue to be widely adopted due to their simplicity and real-time applicability. However, existing PF methods typically oversimplify environmental representations by relying on isotropic, point- or sphere-based obstacle approximations. In human-centred settings, this simplification results in overly conservative paths, cumbersome tuning, and computational overhead -- even breaking real-time requirements. In response, we propose the Geometric Potential Field (GeoPF), a reactive motion-planning framework that explicitly infuses geometric primitives - points, lines, planes, cubes, and cylinders - into real-time planning. By leveraging precise closed-form distance functions, GeoPF significantly reduces computational complexity and parameter tuning effort. Extensive quantitative analyses consistently show GeoPF's higher success rates, reduced tuning complexity (a single parameter set across experiments), and substantially lower computational costs (up to 2 orders of magnitude) compared to traditional PF methods. Real-world experiments further validate GeoPF's robustness and practical ease of deployment. GeoPF provides a fresh perspective on reactive planning problems driving geometric-aware temporal motion generation, enabling flexible and low-latency motion planning suitable for modern robotic applications.
GeoFIK: A Fast and Reliable Geometric Solver for the IK of the Franka Arm based on Screw Theory Enabling Multiple Redundancy Parameters
Mar 06, 2025Modern robotics applications require an inverse kinematics (IK) solver that is fast, robust and consistent, and that provides all possible solutions. Currently, the Franka robot arm is the most widely used manipulator in robotics research. With 7 DOFs, the IK of this robot is not only complex due to its 1-DOF redundancy, but also due to the link offsets at the wrist and elbow. Due to this complexity, none of the Franka IK solvers available in the literature provide satisfactory results when used in real-world applications. Therefore, in this paper we introduce GeoFIK (Geometric Franka IK), an analytical IK solver that allows the use of different joint variables to resolve the redundancy. The approach uses screw theory to describe the entire geometry of the robot, allowing the computation of the Jacobian matrix prior to computation of joint angles. All singularities are identified and handled. As an example of how the geometric elements obtained by the IK can be exploited, a solver with the swivel angle as the free variable is provided. Several experiments are carried out to validate the speed, robustness and reliability of the GeoFIK against two state-of-the-art solvers.