 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFisheye Lens Camera based Autonomous Valet Parking System
Apr 27, 2021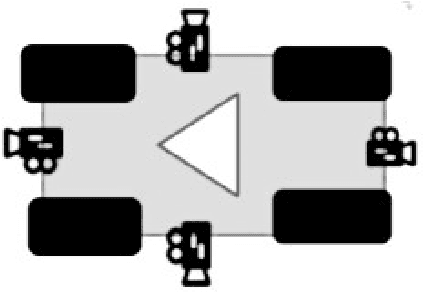
This paper proposes an efficient autonomous valet parking system utilizing only cameras which are the most widely used sensor. To capture more information instantaneously and respond rapidly to changes in the surrounding environment, fisheye cameras which have a wider angle of view compared to pinhole cameras are used. Accordingly, visual simultaneous localization and mapping is used to identify the layout of the parking lot and track the location of the vehicle. In addition, the input image frames are converted into around view monitor images to resolve the distortion of fisheye lens because the algorithm to detect edges are supposed to be applied to images taken with pinhole cameras. The proposed system adopts a look up table for real time operation by minimizing the computational complexity encountered when processing AVM images. The detection rate of each process and the success rate of autonomous parking were measured to evaluate performance. The experimental results confirm that autonomous parking can be achieved using only visual sensors.