 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFew-Shot Adaptation to Non-Stationary Environments via Latent Trend Embedding for Robotics
Mar 11, 2026Robotic systems operating in real-world environments often suffer from concept shift, where the input-output relationship changes due to latent environmental factors that are not directly observable. Conventional adaptation methods update model parameters, which may cause catastrophic forgetting and incur high computational cost. This paper proposes a latent Trend ID-based framework for few-shot adaptation in non-stationary environments. Instead of modifying model weights, a low-dimensional environmental state, referred to as the Trend ID, is estimated via backpropagation while the model parameters remain fixed. To prevent overfitting caused by per-sample latent variables, we introduce temporal regularization and a state transition model that enforces smooth evolution of the latent space. Experiments on a quantitative food grasping task demonstrate that the learned Trend IDs are distributed across distinct regions of the latent space with temporally consistent trajectories, and that few-shot adaptation to unseen environments is achieved without modifying model parameters. The proposed framework provides a scalable and interpretable solution for robotics applications operating across diverse and evolving environments.
Multiple Discourse Relations on the Sentential Level in Japanese
Jul 30, 1996
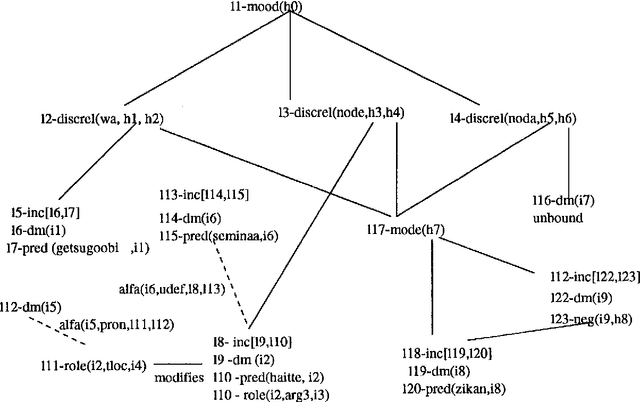
In the German government (BMBF) funded project Verbmobil, a semantic formalism Language for Underspecified Discourse Representation Structures (LUD) is used which describes several DRSs and allows for underspecification. Dealing with Japanese poses challenging problems. In this paper, a treatment of multiple discourse relation constructions on the sentential level is shown, which are common in Japanese but cause a problem for the formalism,. The problem is to distinguish discourse relations which take the widest scope compared with other scope-taking elements on the one hand and to have them underspecified among each other on the other hand. We also state a semantic constraint on the resolution of multiple discourse relations which seems to prevail over the syntactic c-command constraint.
* 6 pages, Postscript
Compositional Semantics in Verbmobil
Jul 30, 1996The paper discusses how compositional semantics is implemented in the Verbmobil speech-to-speech translation system using LUD, a description language for underspecified discourse representation structures. The description language and its formal interpretation in DRT are described as well as its implementation together with the architecture of the system's entire syntactic-semantic processing module. We show that a linguistically sound theory and formalism can be properly implemented in a system with (near) real-time requirements.
* 6 pages, LaTeX, uses colap.sty