 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePorting Code Across Simple Mobile Robots
Mar 02, 2016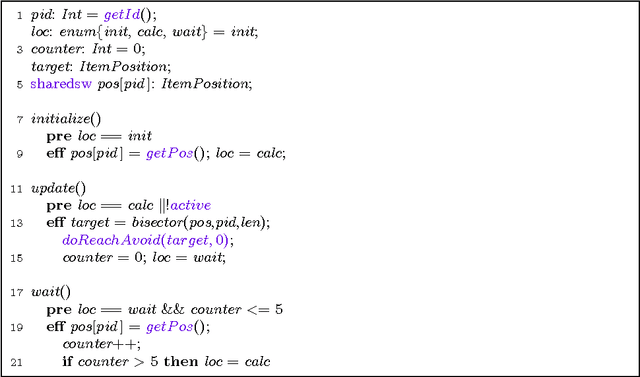
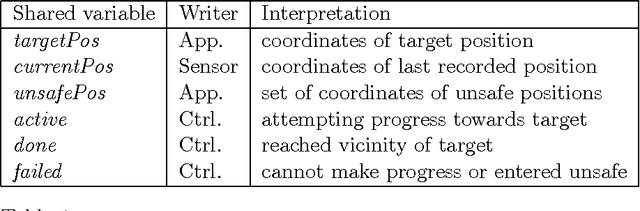
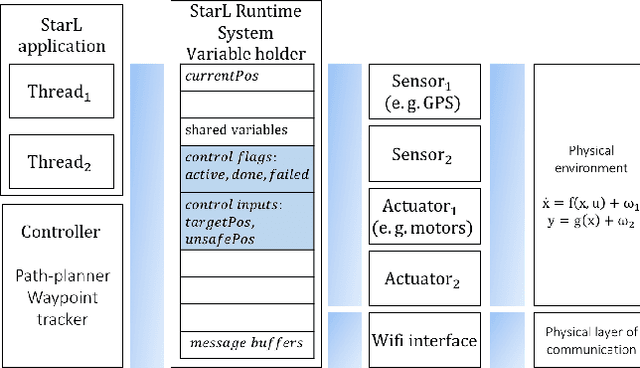
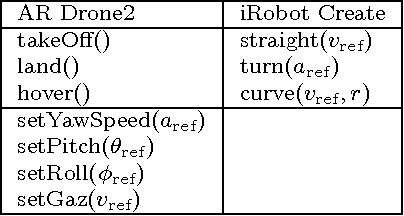
The StarL programming framework aims to simplify development of distributed robotic applications by providing easy-to-use language constructs for communication and control. It has been used to develop applications such as formation control, distributed tracking, and collaborative search. In this paper, we present a complete redesign of the StarL language and its runtime system which enables us to achieve portability of robot programs across platforms. Thus, the same application program, say, for distributed tracking, can now be compiled and deployed on multiple, heterogeneous robotic platforms. Towards portability, this we first define the semantics of StarL programs in a way that is largely platform independent, except for a few key platform-dependent parameters that capture the worst-case execution and sensing delays and resolution of sensors. Next, we present a design of the StarL runtime system, including a robot controller, that meets the above semantics. The controller consists of a platform-independent path planner implemented using RRTs and a platform-dependent way-point tracker that is implemented using the control commands available for the platform. We demonstrate portability of StarL applications using simulation results for two different robotic platforms, and several applications.